
Na úvod by možná stálo za to si vůbec říci,co patří do této kategorie. Jedná se o velmi dynamickou kategorii létání s malými coptery a hlavně o závodění s nimi. Pro někoho, kdo se s touto kategorií zatím nesetkal, tak uvedu jen stručně podstatu těchto závodů : Létá se s malými hbitými coptery po trati, kterou mohou tvořit nějaké branky, překážky, kde se jim závodník musí vyhnout, proletět, obletět. To vše na čas. A zde se uplatní i technika FPV, protože nezřídka jsou coptery řízeny za pomoci videopřenosu z copteru, tedy First Person View. A to je i důvod, proč jsem se rozhodl pojednání o této kategorii zařadit na server o FPV – protože zde platí stejné zákonitosti, jako při klasickém FPV pro účely leteckého snímkování, ale tato kategorie má i svá specifika a věřím, že pro někoho bude toto pojednání možná i vstupenkou do této kategorie RC modelařiny.
Na úvod si tedy řekněme, jak takový copter vypadá. Jedná se většinou o quadrocopter velikosti od 180 do 310. Toto označení velikosti je v podstatě určení velikosti rámu, na kterém je copter postaven a v největší míře se používají rámy velikostí 230 – 250 – 280. A i střední velikost rámu 250 se někdy používá pro označení této kategorie jako Race 250. Pro detailní vysvětlení označení velikosti rámu, je to vzdálenost středů motorů na protilehlých ramenech. Tedy pro rám 250 je tato vzdálenost 250mm. Někdy se i uvádí, že je to průměr kružnice na které leží středy všech 4 motorů. Pro trochu znalé geometrie je to jedno a to samé.
Nyní se již tedy můžeme věnovat tomu, jak se k takovémuto copteru dostat. Opět máme na výběr (jako většinou u všech modelářských kategorií) minimálně ze 2 možností. Jednou je koupit si hotový copter a jít rovnou létat, nebo si copter postavit. První varintu jistě zvolí ti, co nemají zkušenosti s elektronikou, neumí pájet, nemají na to vybavení, případně chtějí jít rovnou létat a nebaví je stavba, oživování, ladění parametrů. Naopak druhou kategorii jistě zvolí modeláři, co mají zkušenosti s elektronikou, nedělají jim potíže pájení, elektrotechnické výpočty, orientují se v problematice řízení, PID regulace a mají chuť se stavbě věnovat a postavit si copter dle svých představ, s vybavením jaké si zvolí a kterému rozumí. Vtomto článku se ted budu věnovat stavbě copteru a jelikož předpokládám určité zkušenosti čtenře, některé detaily nebudu popisovat úplně do detailu. Jsou to věci triviální a běžně používané, takže například popisovat pájení pinů do desky je opravdu ztráta času.
Co tedy budeme potřebovat pro copter :
> Rám
> Pohon (motory + regulátory + vrtule)
> Řídící elektroniku (FC + PDB + GPS)
> FPV přenos (kamera + OSD + videovysílač)
> Baterii pro pohon
> Přijímač od RC soupravy
> volitelně LED diody pro osvětlení
> volitelně další příslušenství podle toho, co od copteru dále požadujeme
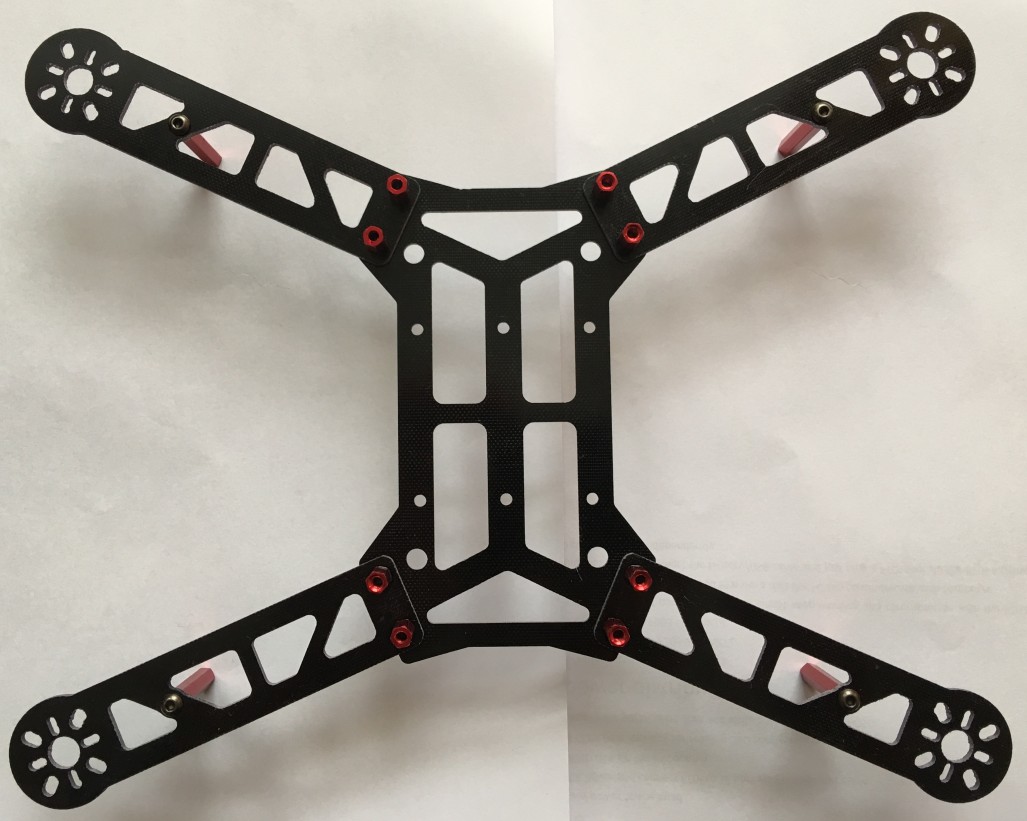
Rámy
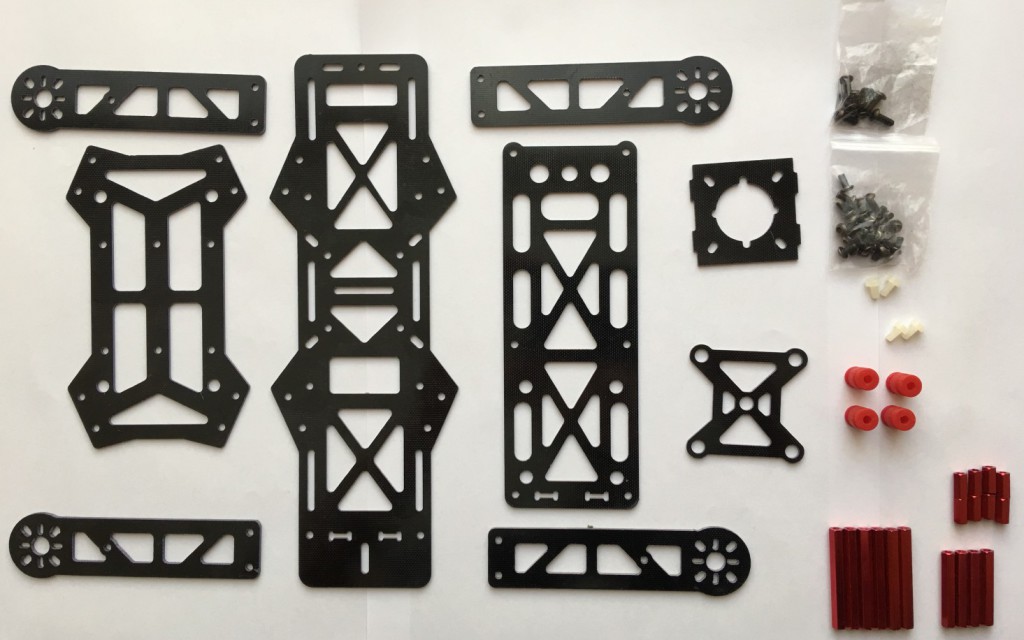
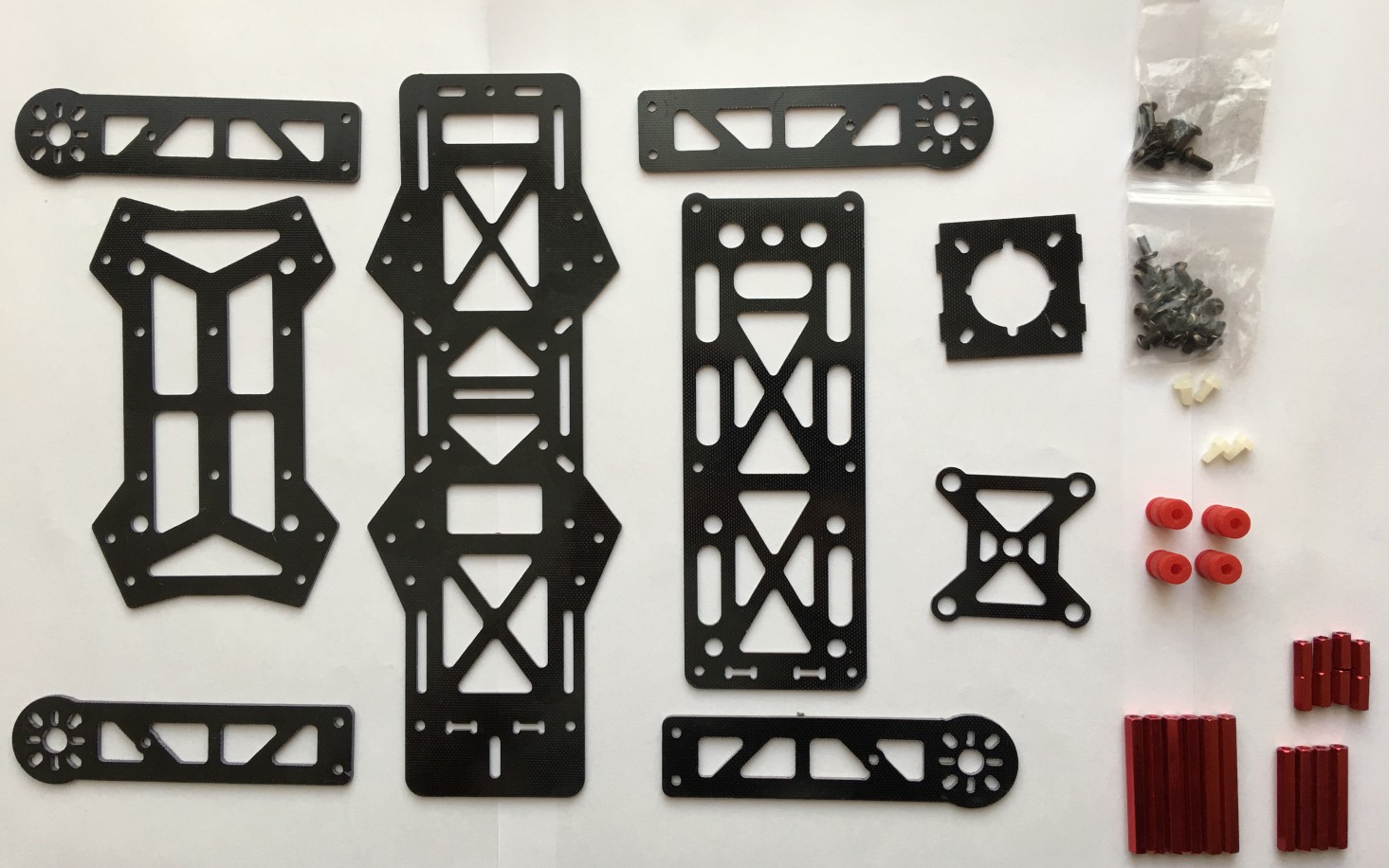
Většinou jsou tvořeny jednou spodní deskou, jednou vrchní deskou, 4-mi rameny pro motory a následně některé mohou být doplněny o další desku s plošnými spoji, která může sloužit jako PDB, případně místo této desky je instalována ještě jedna spodní deska jako výztuha. Desky jsou obvykle frézovány z kompozitů jak ze skelných vláken tak z uhlíkových vláken. Výhoda skelného laminátu je v příznivější ceně, naopak hmotnost základního rámu vychází mírně vyšší než při použití uhlíkových kompozitů. Analogicky použití uhlíkových kompozitů nese vyšší finanční náklady, ale naopak mírně nižší hnotnost rámu. A jak jist správně tušíte, čím nižší hmotnost bude, tím bude copter obratnější a taktéž úspornější (pohon nebude tolik namáhán). Dnes se dají koupit poměrně dobré rámy za ceny už od 500 Kč, ale těm úplně obyčejným bych se vyhnul. Jednak kvůli hmotnosti, jednak kvůli tomu, že při pádu nejsou tak odolné a nastává složitější oprava. Bohužel pádům se nevyhneme a tak je dobré již při stavbě copteru myslet na to, že se někdy něco poškodí. Proto bych se jistě vyhnul rámům lisovaným z plastu z jednoho kusu – při zlomení ramene se musí vše přestrojit do nového rámu – rameno nejde samostatně vyměnit. Z těchto důvodů nadále budu používat rámy skládané a šroubované, kde se dá každá část samostatně vyměnit. Příkladem takového rámu může být například rám XBird 250, QAV 250, QAV 280, BEE245, Kim 250 Pro a další stovky podobných rámů. Na HK nebo banggoodu je těchto rámů dostatek.
Pohon
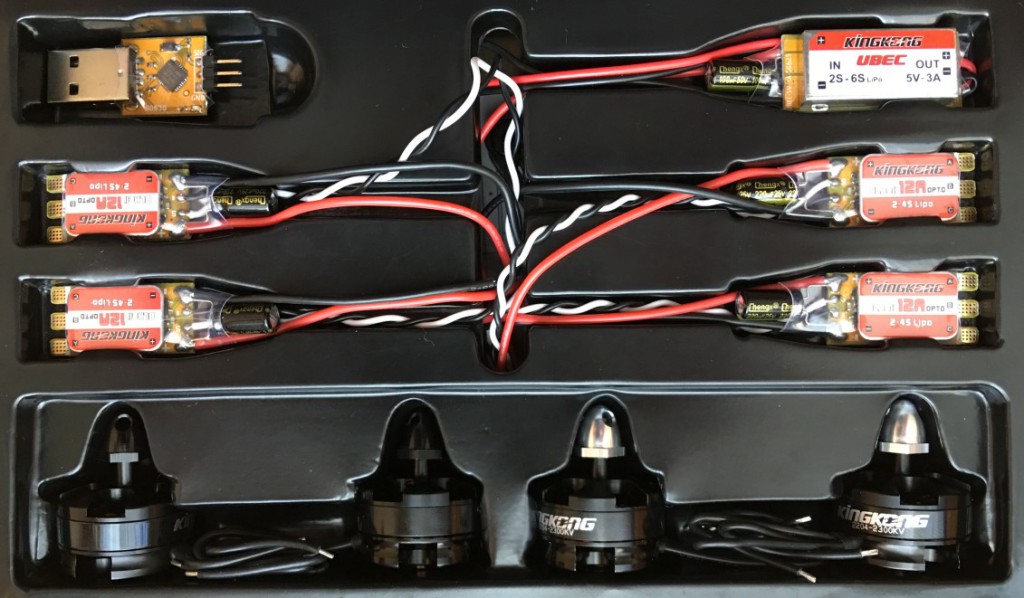
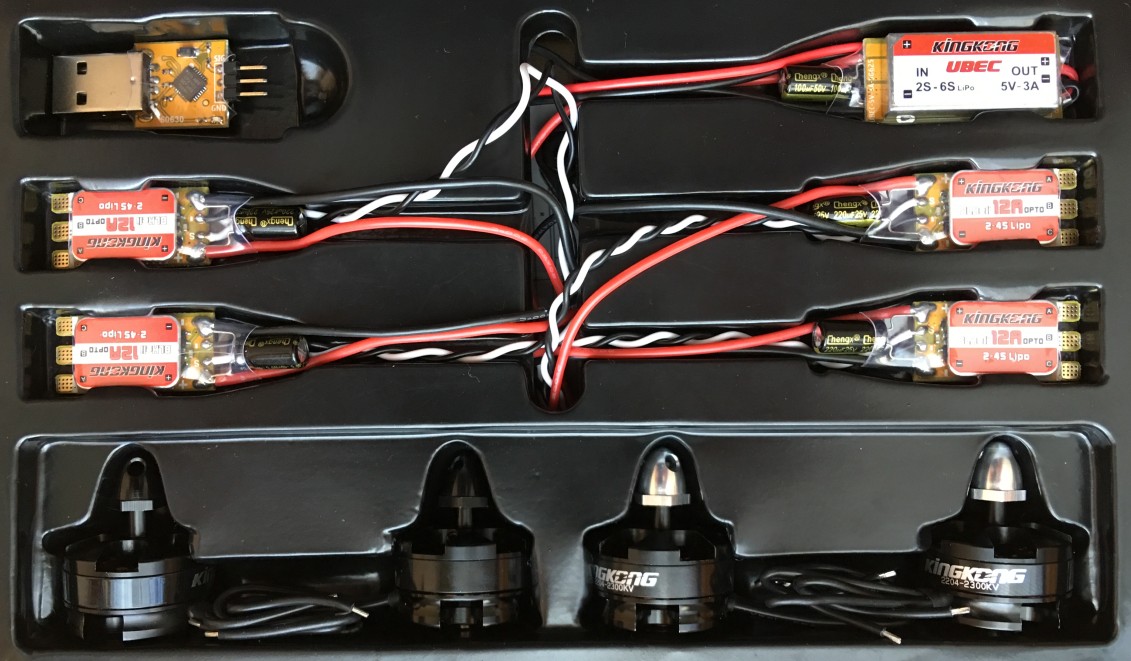
Pro coptery této velikosti se používají převážně motory velikosti 1806, 2204, případně podobné pro vrtule 5 – 6 palců a napájení od 2s do 4s. Stejně tak i regulátory jsou obvykle od 10A do 20A (většinou 12A) a taktéž pro napájení 2s – 4s. Vrtule jsem již přiblížil, kvůli velikosti coptru a rámu se ve většině případů dají použít pouze vrtule 5 palců, na větších rámech i vrtule 6 palců. I zde platí, že je důležité používat motory a regulátory určené pro coptery. Motory vyvážené, lehlé, s rychlou reakcí. Regulátory pro rychlé řízení, nejčastěji se softwarem SimonK nebo BLHeli. Výhodou je i podpora Oneshot 125 pro ještě rychlejší komunikaci FC a ESC a tím pádem i rychlejší řízení motorů. Co se týče nákupu motorů a regulátorů, na výše jmenovaných stránkách se dají bez problémů zakoupit jednotlivé motory, tak i celé sady motorů a regulátorů. Záleží pouze na výběru uživatele a také na tom, co od copteru požaduje.
Řídící elektronika


Řídící deska (FC) je srdcem coptru a i s tímto ohledem by se měla vybírat. Bez kvalitní a dobře fungující desky bude copter nestabilní, nebude létat doře a my se budeme pouze trápit a vymýšlet, co s tím copterem ještě můžeme udělat. A v neposlední řadě výběrem desky si vlastně určujeme, co všechno budeme moci k dané desce připojit a jaké možnosti celý copter bude mít. Uvedu jeden příklad. Výběrem desky co má pouze jeden hardwarový sériový port budeme moci využít například jen GPSku, ale řídící signál bez využití softwaové emulace ze systému S.BUS nepůjde použít. Jenže pokud použijeme softserial porty, nebudeme moci využít například připojení ríditelných LED pásků nebo i připojení proudového senzoru (pokud není vyveden externě jinam). Toto jsou všechno omezení, které musíme nastudovat před nákupem desky. A pokud nebudeme ochotni některé omezení akceptovat, budeme se muset poohlédnout po jiné desce. Naštěstí výběr desek je poměrně bohatý, takže vybrat vhodnou není zas tak velký problém. A naopak pokud požadujeme pouze základní funkčnost, bez přídavných funkcí, vyhoví téměř jakákoli deska – i ta nejobyčejnější. Řídícím deskám se budu věnovat dále v článku, takže zatím bych nezabíhal do úplných detailů, až se budu věnvat vlastní stavbě copteru, bude popis obšírnější. Stejně tak i PDB, případně PDB s BEC obvodem a měřením proudu, to je další posun v možnostech copteru a tak se vyplatí se nad zapojením těchto dalších obvodů minimálně zamyslet. Nejideálnější je vybrat FC desku s podporou PDB a měření proudu a s tímto ohledem koncipovat celou stavbu. O modulu GPS asi není třeba se příliš rozšiřovat, osobně doporučuji používat, velmi dobře poslouží při hledání copteru nejen na rozlehlém poli, tak i třeba v kukuřici (také vlastní zkušenost). K řídící desce se úzce váže i firmware do ní nahraný. I sebelepší desku lze pomocí nevhodného softwaru zařadit k těm špatným. Výběr řídících desek je dnes opravdu široký, jen namátkou uvedu Naze32, CC3D, Skyline32, Brain FPV, Sparky, BeeRotor a desítky dalších. Podobné to je i s firmwarem a jejich ovládacím softwarem. Na výběr je opět více verzí CleanFlight, BaseFlight, BetaFlight, iNav, LibrePilot (dříve OpenPilot ), dRonin a další. V tuto chvíli je ale nutné uvést, že nelze použít veškerý firmware na všech deskách. Z důvodů hardwarových odlišností například BeeRotor nepodporuje dRonin. Ale zase naopak většina desek běží s CleanFlightem nebo BaseFlightem. Rozhodně je ale nutné před nákupem desky prozkoumat, jestli námi zamýšlený firmware poběží na dané desce či nikoliv.
FPV přenos
Zde platí vše co bylo napsáno v jiných článcích na tomto serveru. Pouze k OSDčku lze uvést, že existují desky, obsahující již v sobě OSDčka, takže zde máme situaci jednodužší, nemusíme nic navíc propojovat, pouze naprogramujeme a používáme. Pokud FC nemá OSD integrované, dají se externě připojit, ale zase potřebujeme port pro sériovou komunikaci a bohužel některé desky mají tuto komunikaci „společnou“ s USB, takže při nastavování desky musí být OSD fyzicky odpojeno, aby fungoval USB port. To vše si ale probereme u konkrétních FC a OSD.
Baterie pro pohon
Tak k bateriím se snad nemá cenu příliš rozepisovat a popisovat, že musíme vybírat takovou, aby měla odpovídající velikost, kapacitu, proudovou zatížitelnost. To jsou opět věci co modeláři vědí a znají.
Přijímač od RC soupravy
Zde je situace podobná jako u baterií. Každému je jasné, že sám copter nepoletí, takže nemá cenu popisovat přijímače a jejich členění. Snad jen za zmínku stojí různé LRS systémy ať už na 433 MHz, 868 MHz nebo jiných podobných frekvencích, kde se dá dosáhnout vzdáleností v řádech kilometrů. Samozřejmě je otázkou, zda tak daleko vůbec copter doletí na danou baterii. Z vlastní zkušenosti vím, že na baterii 1500 mAh se dají obletět celkem cca 2km, což by znamenalo 1km tam a 1km zpět. A na to stačí i obyčejná RC souprava.
LED diody pro osvětlení
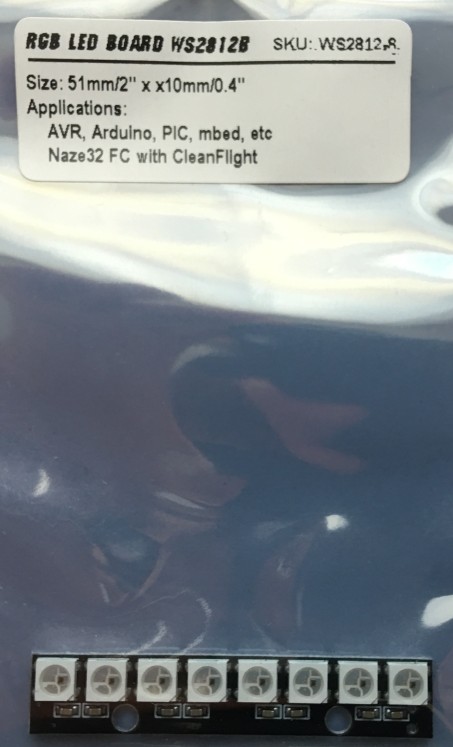
V případě copterů se dají využít i programovatelné RGB diody a jejich řazením lze dosáhnout různých efektů, jako třeba změna barvy dle pozice plynové páky, při zatáčení efektu „blinkrů“ na danou stranu, případně se dají použít i jako „stavové“ diody pro hlášení aktuální kondice coptru. Toto je samozřejmě o to potřebnější když se létá neFPV, ale klasicky „na oči“. A i obyčejné jednobarevné pásky mají své opodstatnění, ať už jde o prostou orientaci coptru ve vzduchu, tak například v případě havárie lze model snadněji nalézt.
Volitelné další příslušenství
Do těchto zařízení lze zařadit vše co není nezbytně nutné pro let coptru, ale může nám „nějak“ pomoci. Zařadil bych sem jednak GPS vyhledávačky modelu, akustické signalizace čehosi, stavové diody, telemetrické ústředny a veškerá další myslitelná zařízení.
Nyní už by jsme se mohli věnovat ukázce stavby jednoho takového copteru. Uvedu zde jednak komponenty co použiju, tak k nim i nějaká technická data. Samozřejmě každý může použít jiné komponenty, ale základní myšlenka je stále stejná – vytvořit létající copter. Jak je vidět z již přiložených fotografií, veškeré komponenty pro copter mám k dispozici,takže stavba může začít.
 Nejprve sestavíme spodní základ rámu, do něj uchytíme PDB desku (rozvod napájení a taktéž měření napětí a proudu), k této desce připojíme napájecí vodiče od regulátorů a osadíme motory.
Nejprve sestavíme spodní základ rámu, do něj uchytíme PDB desku (rozvod napájení a taktéž měření napětí a proudu), k této desce připojíme napájecí vodiče od regulátorů a osadíme motory.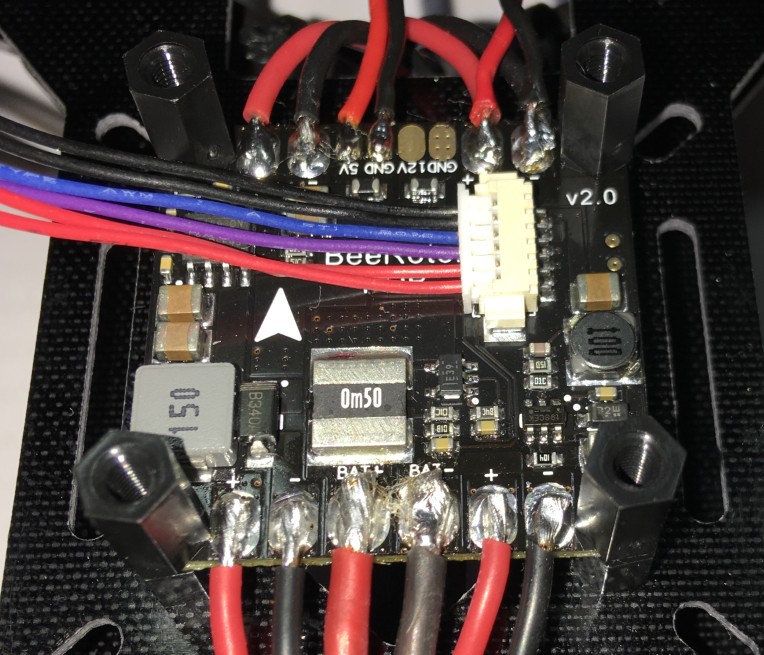 Co se týče motorů, vřele doporučuji podle daného směru otáčení (najdeme v dokumentaci k danému ovládacímu softwaru) nanečisto vyzkoušet směry otáčení a poté již instalovat motory a regulátory na rám. Přecijen v této fázi stavby je to pohodlnější než poté na sestaveném coptru. Samozřejmě některé regulátory umí změnit směr otáčení softwarově, poté není nutné toto řešit a můžeme motory s regly propojit libovolně. To je i případ mnou použitých regulátorů – veškeré hodnoty se nastavují pohodlně z počítače – software BLHeli Suite.
Co se týče motorů, vřele doporučuji podle daného směru otáčení (najdeme v dokumentaci k danému ovládacímu softwaru) nanečisto vyzkoušet směry otáčení a poté již instalovat motory a regulátory na rám. Přecijen v této fázi stavby je to pohodlnější než poté na sestaveném coptru. Samozřejmě některé regulátory umí změnit směr otáčení softwarově, poté není nutné toto řešit a můžeme motory s regly propojit libovolně. To je i případ mnou použitých regulátorů – veškeré hodnoty se nastavují pohodlně z počítače – software BLHeli Suite. 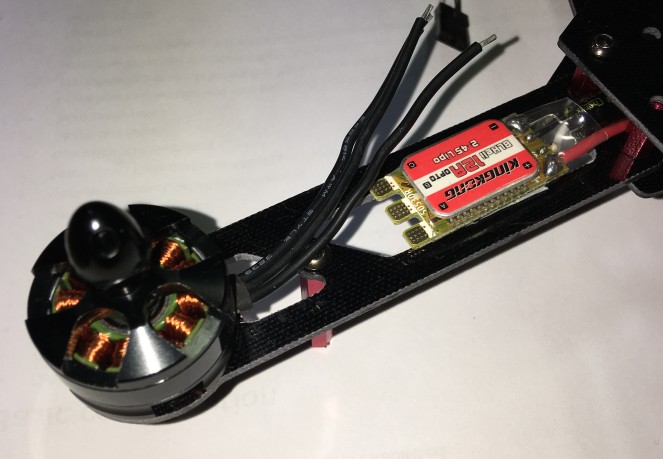 Po konfiguraci regulátorů je připojíme k motorům.
Po konfiguraci regulátorů je připojíme k motorům. 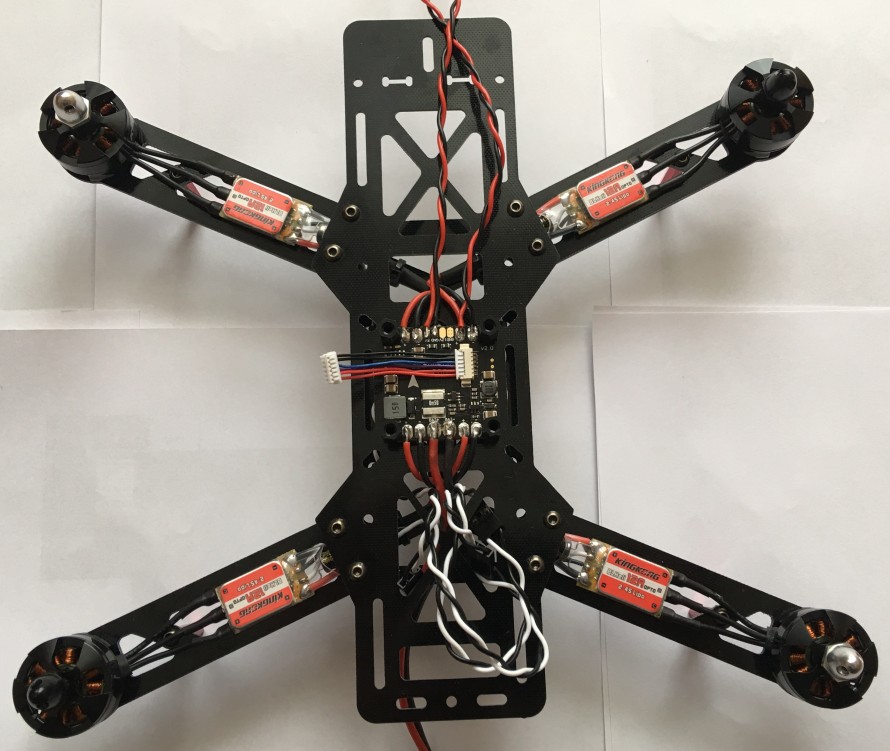 Samozřejmě instalaci máme doplněnu o vodiče od reglů, kam později připojíme na 12V videovysílač, případně 12V kameru. Taktéž jsem si vyvedl i 5V napájení, jednak pro diodový pásek, nebo pro 5V kameru. V mém případě jsem nakonec použil kameru na 5V, takže tento vývod poslouží k jejímu napájení. V tuto chvíli si připravíme FC desku – připájíme kolíkové lišty.
Samozřejmě instalaci máme doplněnu o vodiče od reglů, kam později připojíme na 12V videovysílač, případně 12V kameru. Taktéž jsem si vyvedl i 5V napájení, jednak pro diodový pásek, nebo pro 5V kameru. V mém případě jsem nakonec použil kameru na 5V, takže tento vývod poslouží k jejímu napájení. V tuto chvíli si připravíme FC desku – připájíme kolíkové lišty. 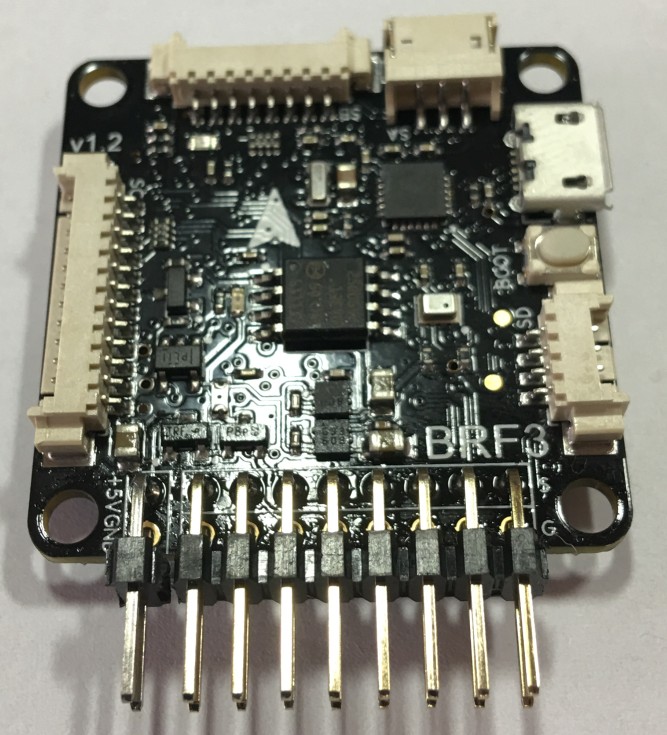 A takto připravenou desku nainstalujeme do coptru a propojíme s PDB deskou.
A takto připravenou desku nainstalujeme do coptru a propojíme s PDB deskou. 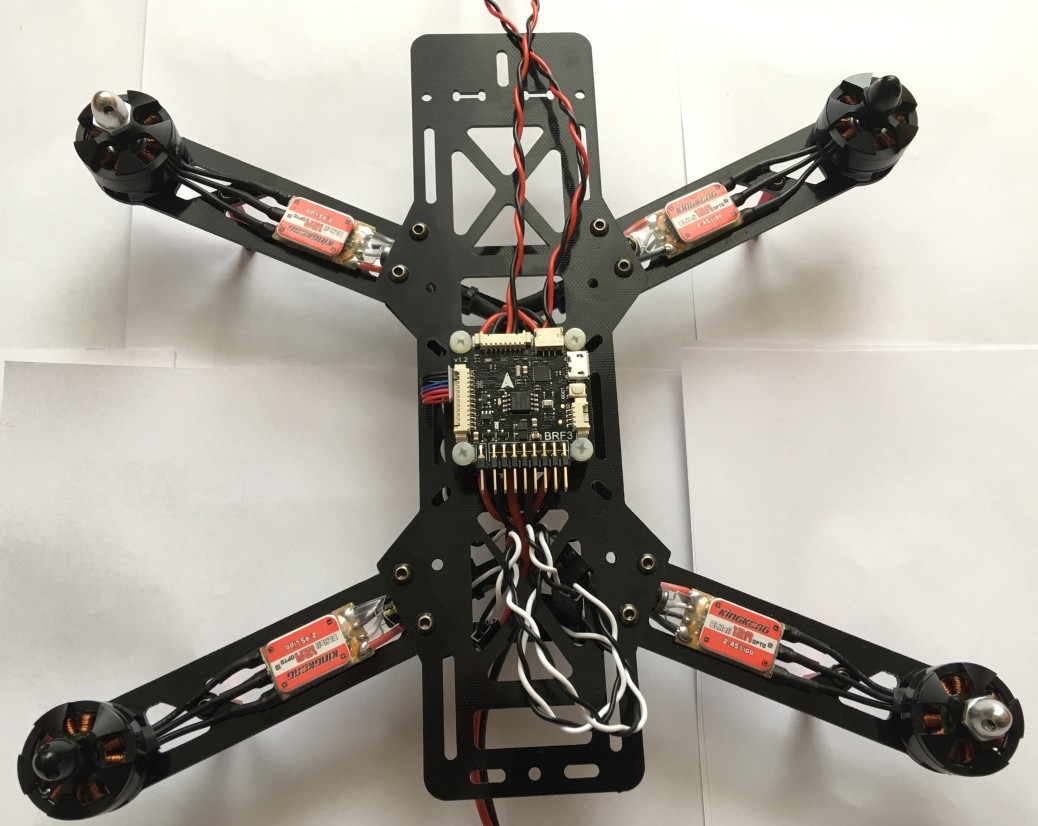 Nyní již stavba bude pokračovat velmi rychle, nebudu zde do detailu popisovat všechny kroky, kdo se dostal až do tohoto místa, tak instalaci přijímače, kamery a videovysílače zvládne i bez detailního popisu.
Nyní již stavba bude pokračovat velmi rychle, nebudu zde do detailu popisovat všechny kroky, kdo se dostal až do tohoto místa, tak instalaci přijímače, kamery a videovysílače zvládne i bez detailního popisu.  Stejné to je i s případnými dalšími moduly, jako je GPS, magnetometr (mnou použitá deska nemá magnetometr přímo na desce) ale má sběrnici I2C a tak není problém zakoupit modul magnetometru a připojit – ovládací software pozná připojený magnetometr a začne ho po kalibraci hned používat. S GPS modulem to je podobné, pokud vše zapojíme správně, ihned se v ovládacím softwaru rozsvítí piktogram GPS. Snad bych se jen pozastavil u přijímače. Bohužel deska nepodporuje připojení PWM, ale pouze PPM, SBUS, Spectrum satelit. Můžeme použít konvertor PWM na PPM, nebo vybereme přijímač, který umí některý ze sériových výstupů. Podle toho nakonfigurujeme ovládací software.
Stejné to je i s případnými dalšími moduly, jako je GPS, magnetometr (mnou použitá deska nemá magnetometr přímo na desce) ale má sběrnici I2C a tak není problém zakoupit modul magnetometru a připojit – ovládací software pozná připojený magnetometr a začne ho po kalibraci hned používat. S GPS modulem to je podobné, pokud vše zapojíme správně, ihned se v ovládacím softwaru rozsvítí piktogram GPS. Snad bych se jen pozastavil u přijímače. Bohužel deska nepodporuje připojení PWM, ale pouze PPM, SBUS, Spectrum satelit. Můžeme použít konvertor PWM na PPM, nebo vybereme přijímač, který umí některý ze sériových výstupů. Podle toho nakonfigurujeme ovládací software. 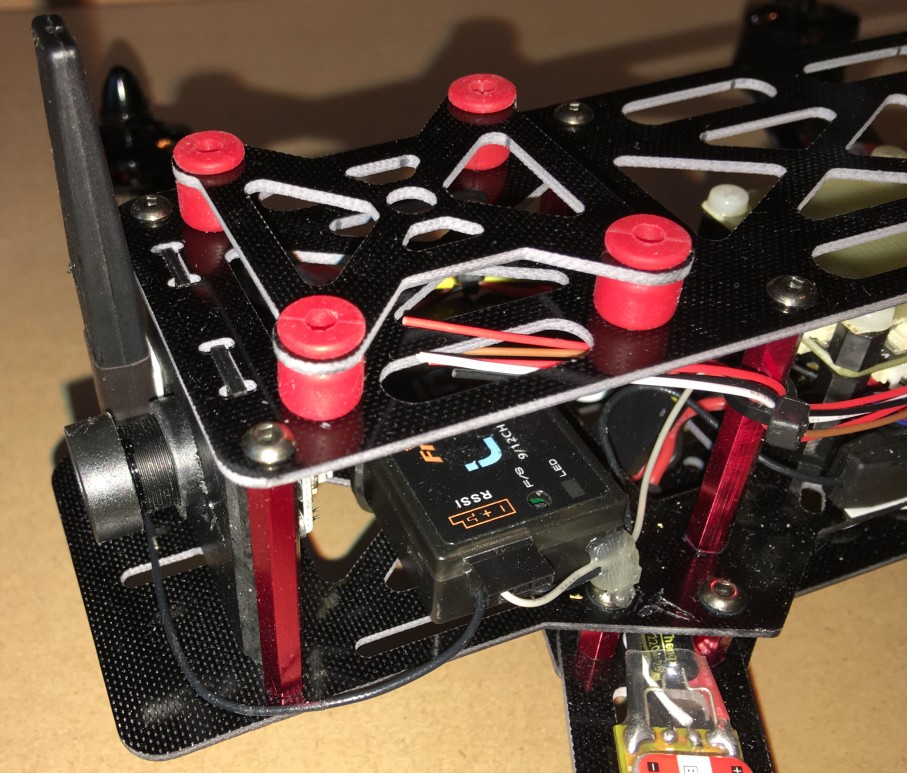 Já jsem použil přijímač FrSky L9R, což je přijímač s dlouhým dosahem. Má jednak 9 kanálů PWM, tak má i výstup SBUS a RSSI. Oba posledně jmenované využijeme, ovládací sgnál nakonfigurujeme na sériový vstup UART3, RSSI je přímo vyvedeno v konektoru vedle vstupu PPM, UART2 použijeme pro GPS a UART1 je vyhrazen pro USB připojení k počítači. FC má v sobě i integrováno OSD, takže použijeme konfigurátor MWOSD a přes FTDI kabel naprogramujeme zobrazované hodnoty. Pro jednoduchost je k FC přibalena u „redukce“ z malého JST konektru na klasický „servokonektor“ s roztečí pinů 2.54mm.
Já jsem použil přijímač FrSky L9R, což je přijímač s dlouhým dosahem. Má jednak 9 kanálů PWM, tak má i výstup SBUS a RSSI. Oba posledně jmenované využijeme, ovládací sgnál nakonfigurujeme na sériový vstup UART3, RSSI je přímo vyvedeno v konektoru vedle vstupu PPM, UART2 použijeme pro GPS a UART1 je vyhrazen pro USB připojení k počítači. FC má v sobě i integrováno OSD, takže použijeme konfigurátor MWOSD a přes FTDI kabel naprogramujeme zobrazované hodnoty. Pro jednoduchost je k FC přibalena u „redukce“ z malého JST konektru na klasický „servokonektor“ s roztečí pinů 2.54mm. V tuto chvíli máme copter v podstatě hotový a můžeme se plně věnovat už vlastní konfiguraci FC, OSD a až budeme mít toto hotovo, osadíme vrtule, baterii, FullHD kameru (není nezbytná) a můžeme jít testovat, ladit parametry desky a létat.
V tuto chvíli máme copter v podstatě hotový a můžeme se plně věnovat už vlastní konfiguraci FC, OSD a až budeme mít toto hotovo, osadíme vrtule, baterii, FullHD kameru (není nezbytná) a můžeme jít testovat, ladit parametry desky a létat.  Možná nyní někoho zklamu, ale nebudu se zde detailně věnovat nastavení parametrů FC. Je to ze dvou jednoduchých důvodů. Jednak, jak bylo uvedeno, ovládacích softwarů existuje několik a každý se ovládá a nastavuje trochu odlišně, tak ne každé nastavení lze aplikovat na různé FC desky. A tak je na každém uživateli, jak si copter naladí, aby to vyhovovalo jeho požadavkům, jeho desce a užití copteru. Jak jsem již předeslal na začátku článku, pokud budeme chtít copter dovybavit bzučákem, LED pásky a podobně, naší kreativitě se meze nekladou.
Možná nyní někoho zklamu, ale nebudu se zde detailně věnovat nastavení parametrů FC. Je to ze dvou jednoduchých důvodů. Jednak, jak bylo uvedeno, ovládacích softwarů existuje několik a každý se ovládá a nastavuje trochu odlišně, tak ne každé nastavení lze aplikovat na různé FC desky. A tak je na každém uživateli, jak si copter naladí, aby to vyhovovalo jeho požadavkům, jeho desce a užití copteru. Jak jsem již předeslal na začátku článku, pokud budeme chtít copter dovybavit bzučákem, LED pásky a podobně, naší kreativitě se meze nekladou.
Po nafocení fotografií a napsání tohoto článku jsem byl upozorněn na to, že u mé sady neodpovídá osazení motorů a na nich závitů CW a CCW. Je to tak, motory co jsem použil toto měly OPAČNĚ než většina používaných motorů. Jestliže budeme používat motor, kde je stříbrná čepička s klasickým závitem (tedy doprava utahujeme) tak tento motor je umístěn na pravém předním ramenu (ne jako na fotografii vlevo).
Na závěr snad jen „ceník“ mnou použitých komponent, aby jste si mohli udělat představu, na kolik takovýto (podobný) copter vyjde :
> Rám – 800 Kč
> Pohon (motory + regulátory + vrtule) – 2.000 Kč
> Řídící elektroniku (FC + PDB + GPS) – 1.500 Kč
> FPV přenos (kamera + OSD + videovysílač) – 1.500 Kč
> Baterii pro pohon – 500 Kč
> Přijímač od RC soupravy – 1.000 Kč
Tyto ceny jsou takové, za jaké jsem komponenty sehnal v říjnu 2016 a nelze je brát jako jednoznačné, jistě se dají koupit i levnější komponenty, ale také dražší. Je pouze na uživateli, jaké komponenty použije.
A pokud se vše povede, může to vypadat takto : https://www.youtube.com/watch?v=Q4jwKJU6yzg
No a když si elektronika postaví hlavu, vypadá to takto : https://www.youtube.com/watch?v=oqsWN1OC1zc Provysvětlení jen uvedu, že na desce se „zbláznily“ akcelerometry a trochu „kecaly“. Je to vidět na AHI a na jeho poloze vůči opravdovému horizontu.
Na závěr si neodpustím bezpečnostní upozornění : copter není hračka, v rukou nezodpovědného uživatele se může stát nebezpečnou zbraní. Přistupujte k němu prosím tak, že je to pouze elektronika a nikdo nikdy neví, co se může stát. Létejte prosím bezpečně, neohrožujte sebe ani ostatní a vždy používejte rozum. A pokud si po přečtení tohoto článku nejste jisti stavbou, nastavením, nebo čímkoli jiným, do stavby vlastního coptru se nepouštějte a toto svěřte zkušenějším kolegům. Zásadně nemohu přebrat odpovědnost za škody vzniklé provozem Vašeho coptru, za jeho stavbu a provoz jste odpovědni pouze Vy sami.
k 🙂 výborný simulátor pro tyto coptery https://fpv-freerider.itch.io/fpv-freerider k tomu http://www.peckamodel.cz/produkt/simulatory-a-prislusenstvi/1hi1201-usb-simtransmitter-simulator-m2