
V tomto článku bych Vám rád ukázal stavbu copteru od návrhu až po výsledný let a použití pro FPV a letecké snímkování. Postupně zde budu uvádět postup prací na copteru a budu zde zveřejňovat i fotografie z průběhu stavby.
Část první – Výběr stroje
Jako vždy, nejprve si musí uživatel vybrat, jaký copter chce a hlavně co od něho očekává. V mém případě jsem věděl, že to bude stroj pro FPV a letecké snímkování a že chci, aby byl letový projev stabilní a také, aby copter dané vybavení unesl s tím, že do budoucna by bylo možné copter upgradovat, například užitím silnějších motorů, lepších a větších vrtulí atd.
Dle těchto požadavků jsem se rozhodl pro hexacopter. Po tomto rozhodnutí mě čekal výběr rámu. Nejprve jsem zvažoval postavit si copter celý dle vlastního návrhu, ale náhodou jsem objevil rám Hexacopter Turnigy HAL. Tento rám se mi líbil z několika důvodů. Prvním z nich byla výška copetru, takže umístění kamery s gimbalem bude bezproblémové, dále celková velikost, kde nebude problém nasadit velké vrtule a v neposlední řadě i vrchní kryt elektroniky. Bohužel se našly i věci, co se mi nelíbily. První z nich byl materiál na středové desky – dural. Přeci jen když si odmyslím váhu, tak si nedovedu představit, že by nějaký vodič „spadnul“ na tuto desku a došlo by ke zkratu. Z tohoto důvodu jsem se rozhodl, že si středové desky navrhnu sám a z jiného materiálu. Další věcí byla absence jakéhokoli „návodu“ na rozložení komponent a tak bylo rozhodnuto, že si „vnitřek copteru“ budu muset udělat podle svého. Na jednu stranu jsem byl rád, že se nebudu muset omezovat nápady výrobce a budu si moci upravit copter dle svých požadavků.
Část druhá – Návrh copteru
Poté, co mi dorazil domů skelet copteru, přistoupil jsem k prohlídce všech dílů a následně jsem zasedl k počítači a začal jsem tvořit vlastní návrh středových desek. Má představa copteru je vyobrazena na tomto konceptu.
Na následujících obrázcích jsou jak původní komponenty, tak mnou navržené a vyrobené díly z uhlíkové desky.
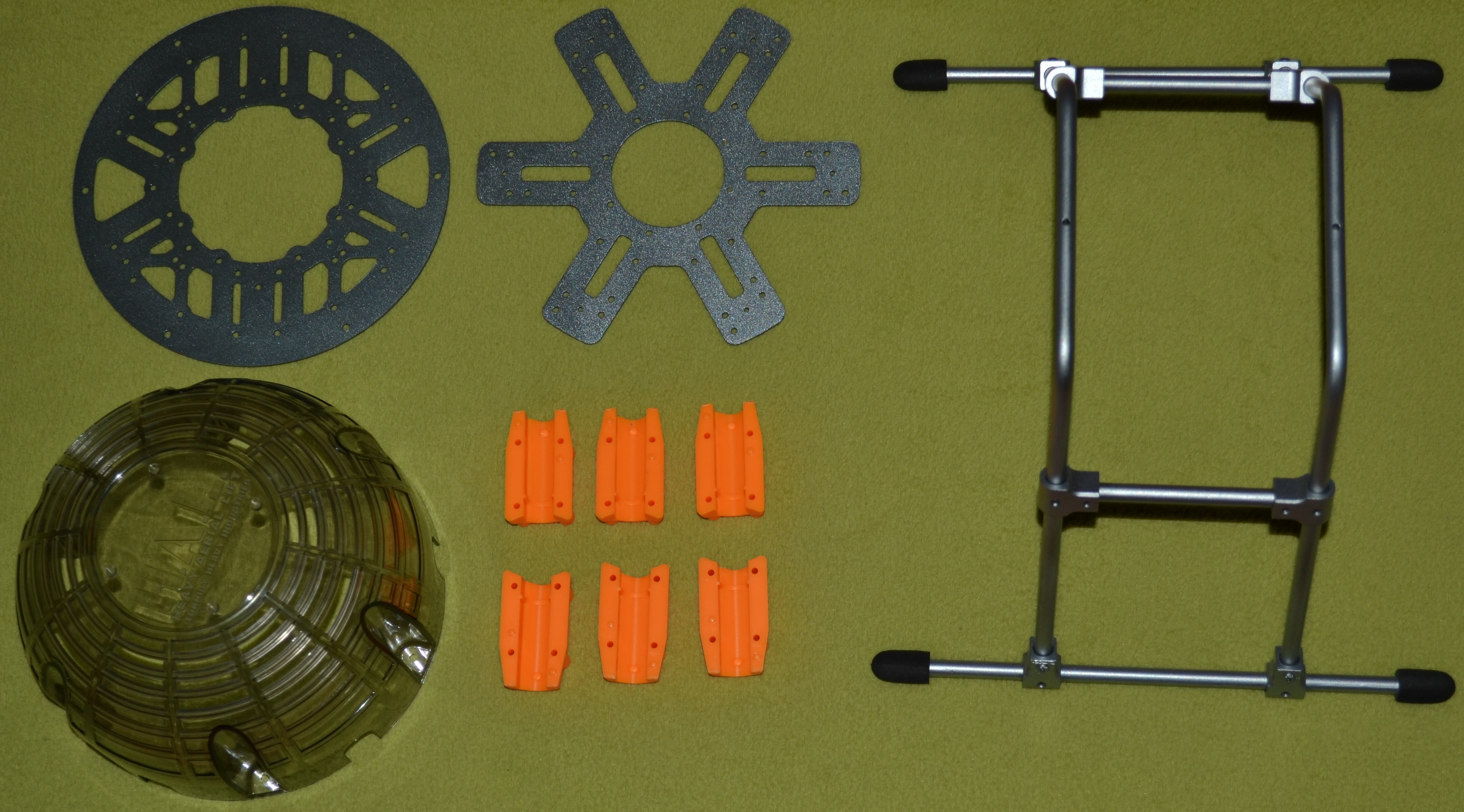
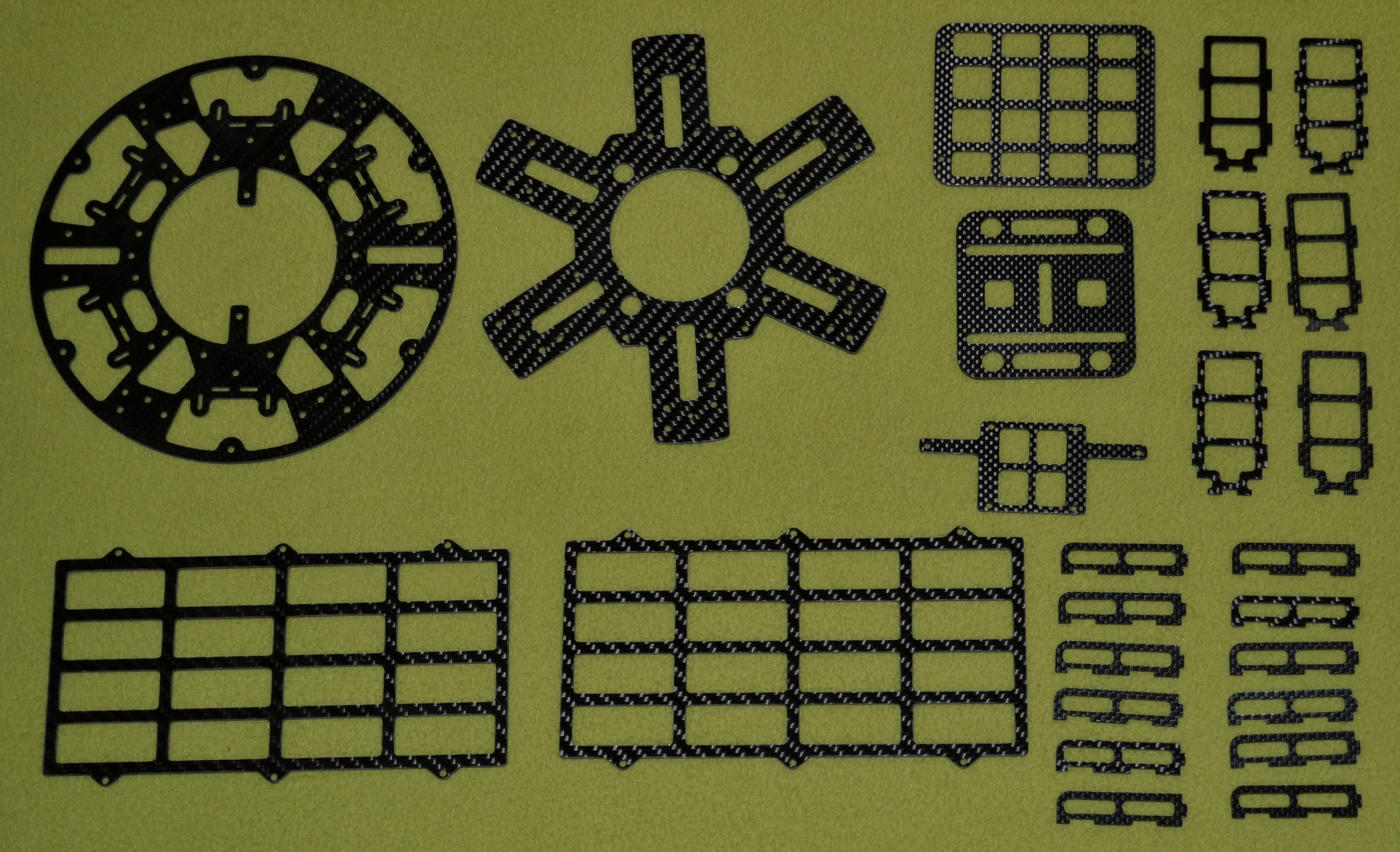
Na prvním obrázku jsou vidět původní duralové desky, sestava podvozku, držáky ramen a vrchní kryt celého copteru. Nejsou vyfocena ramena ( duralová trubka ) a držáky motorů. Na druhém obrázku jsou vidět všechny díly dle mého návrhu a to jak vlastní středové desky, tak držáky regulátorů, deska pro řídící elektroniku, deska pro přídavnou elektroniku, deska nosiče GPSky a taktéž desky pro baterii pohonu. Držák gimbalu zde ještě není, protože v první fázi nebude gimbal osazen, ale v copteru je na gimbal udělána příprava uchycení a tak bude stačit poté jen dodělat jednu desku a bude se moci nainstalovat i gimbal pro kameru. FPV vybavení je plánováno na tuto desku gimbalu, pod baterií pro pohon.
Část třetí – Stavba začíná
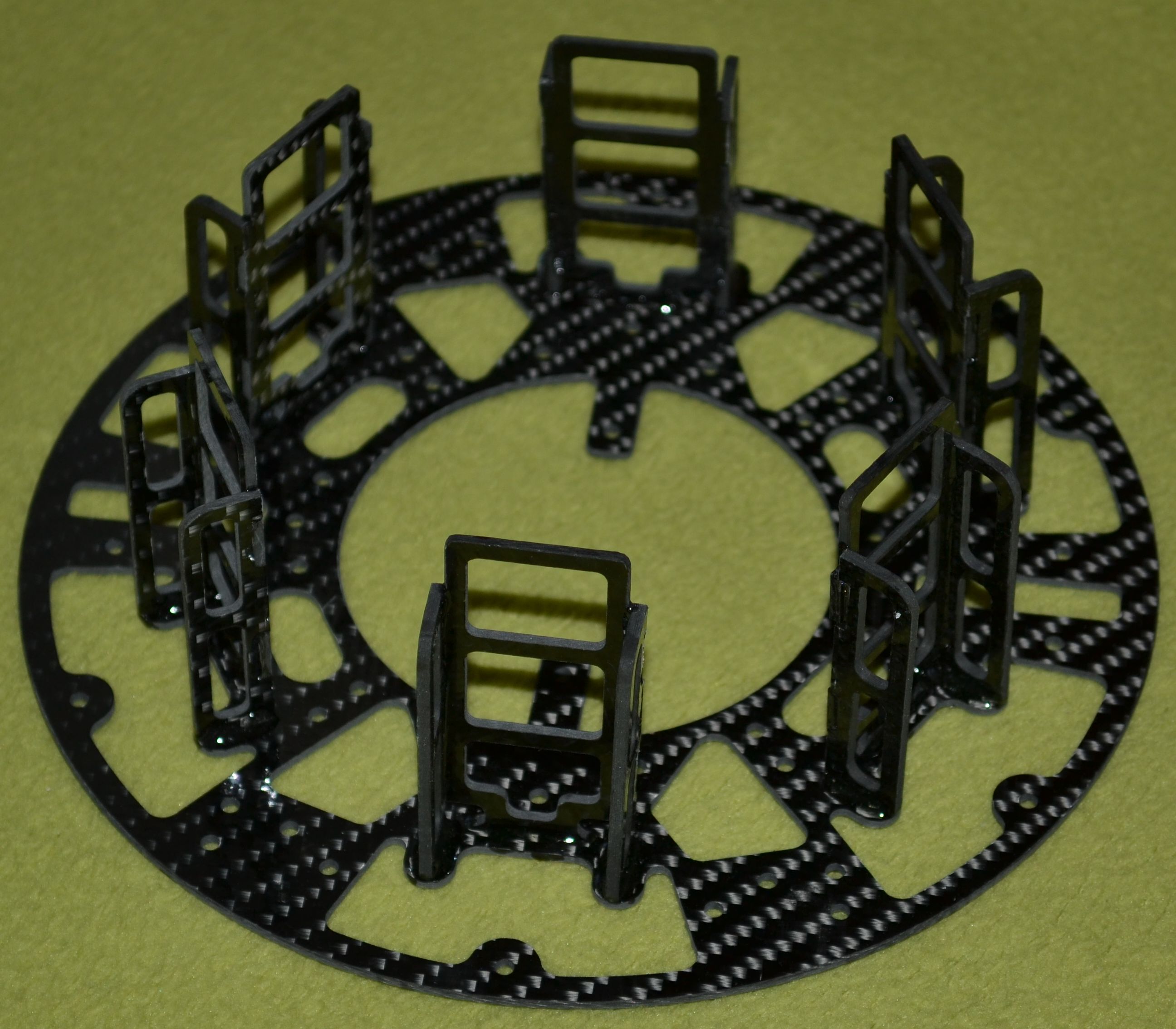
Stavbu copteru jsem započal slepením „klecí“ na regulátory. Tyto „klece“ jsem umístil na spodní centrální desku mezi držáky ramen. Reguláory jsem vybral osvědčené DJI 30A OPTO. Umnístění je svisle z toho důvodu, že do regulátorů se motory budou zapojovat konektory G3.5 a směrem nahodu je více místa.
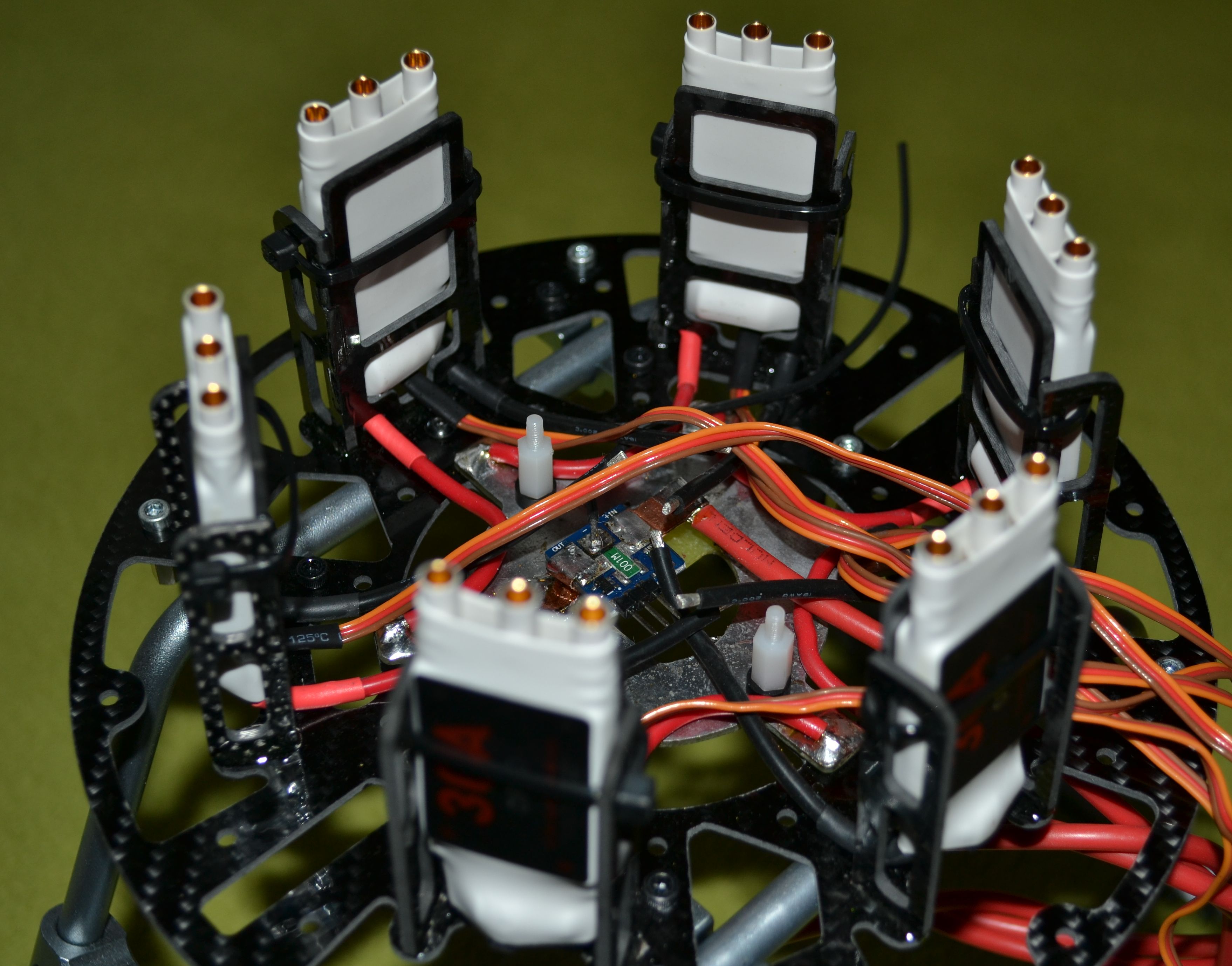
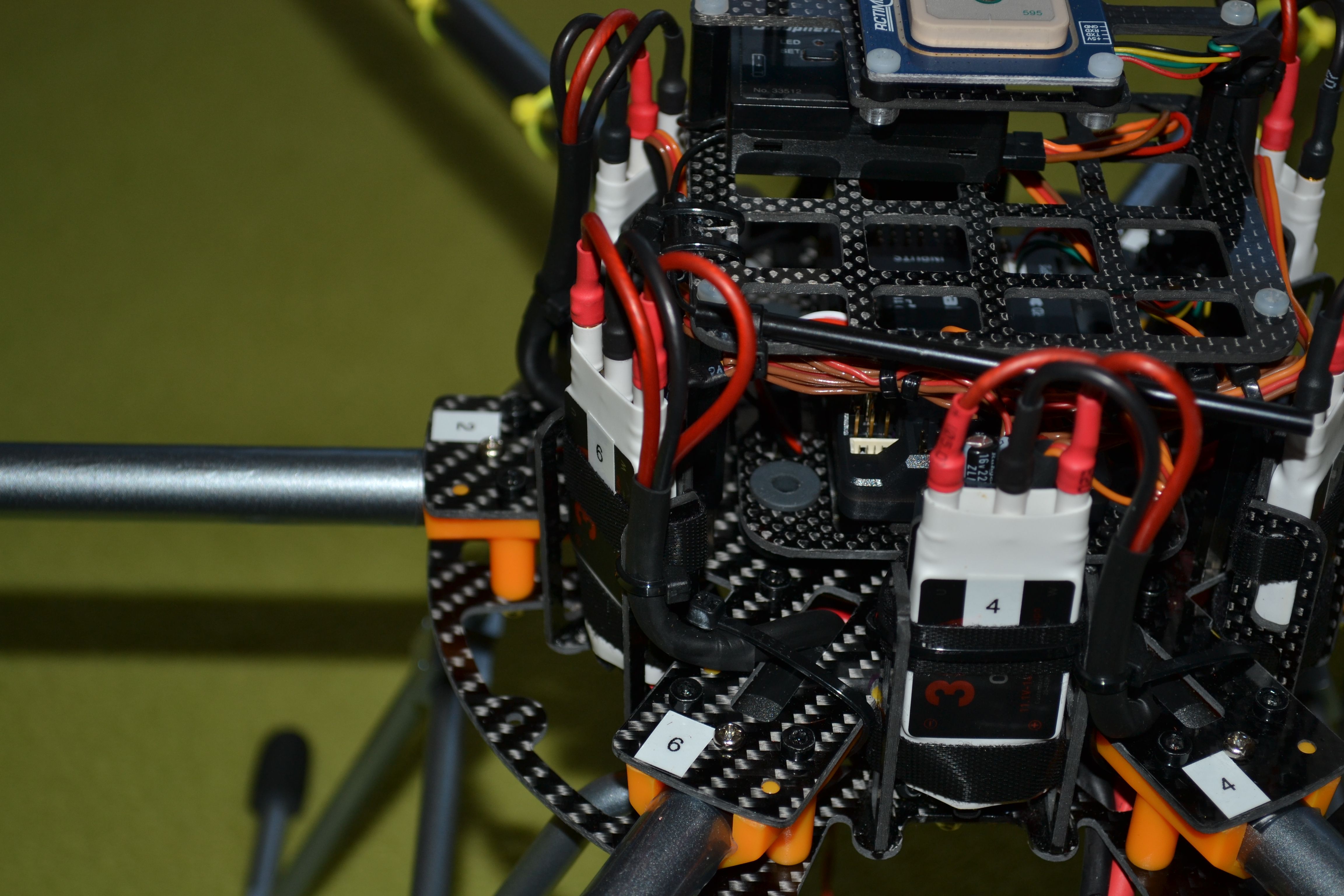
Následovalo připevnění podvozku a osazení regulátorů. Pro rozvod napájení jsem se rozhodl pro 2 oddělené desky z cuprextitu a k nim budou připojeny regly a také baterie. Jelikož je zapotřebí vědět i o spotřebované energii, je nutné pro řídící elektroniku osadit snímač proudu. Na dalším obrázku je detail osazení reglů a první rozvodnou deskou se senzorem proudu.
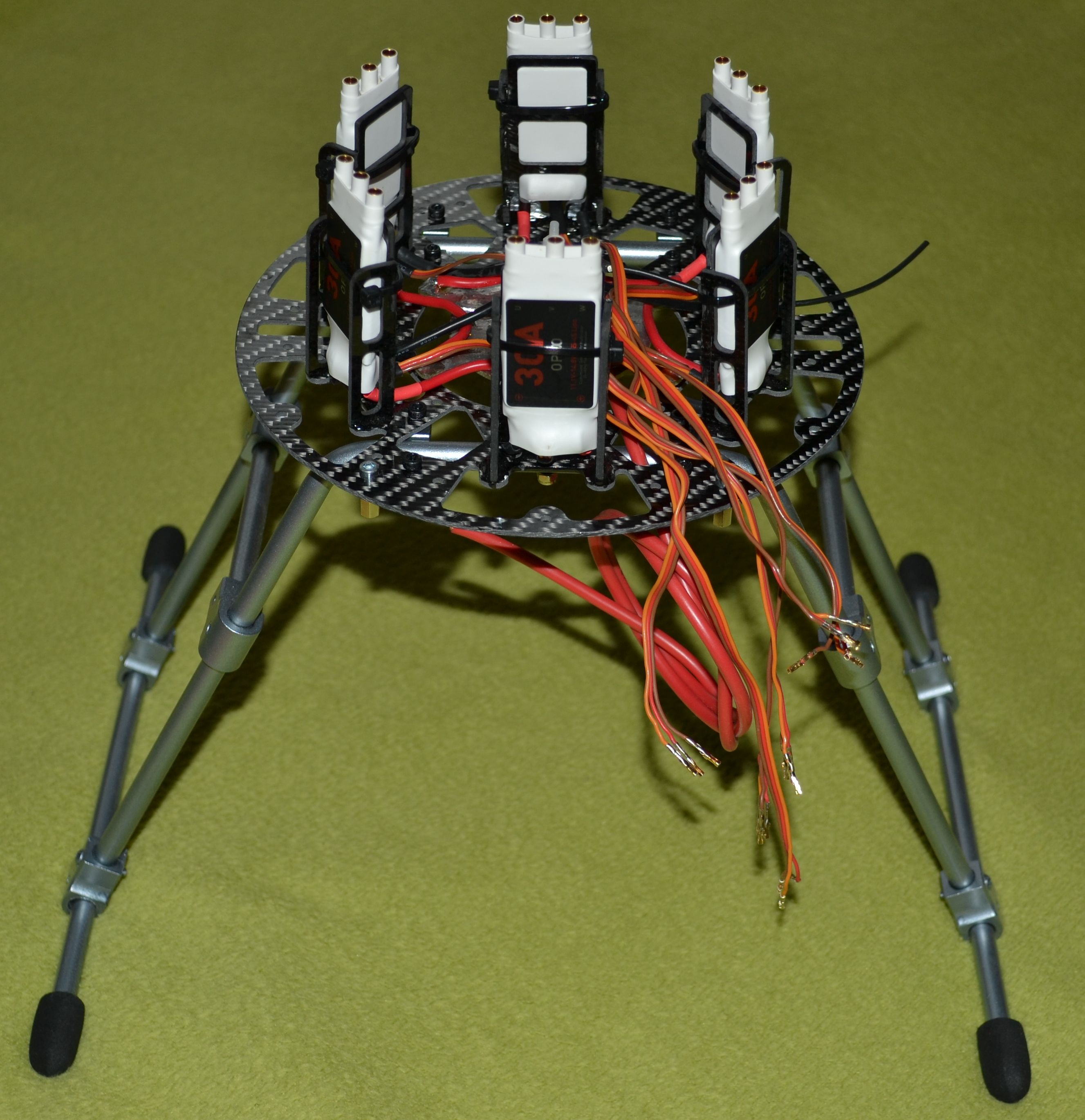
a na dalším obrázku je celá sestava s podvozkem.
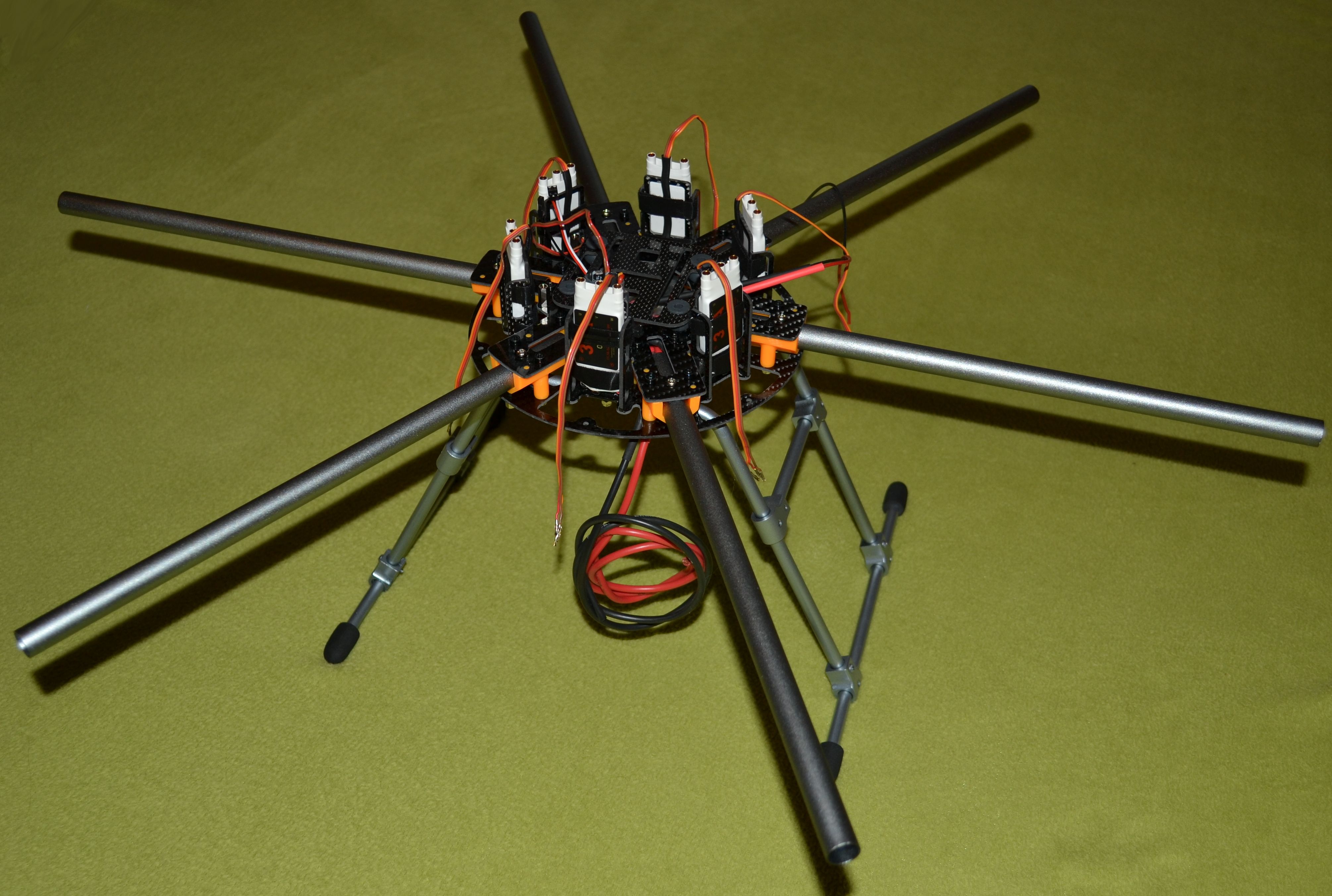
Část čtvrtá – Připevnění ramen
Na tento základ copteru je již možno namontovat ramena. Jelikož je rozvod elektřiny již hotov, nic nám nebrání rozvodné desky zakrýt vrchní nosnou deskou. V tuto chvíli je důležité upozornit na to, že regulátory nemají BEC, takže je nutno použít externí BEC a ten musí mít samozřejmě napájení. Použiji BEC také od firmy DJI a to ten samý, jako je dodáván k jednotce NAZA – M. Z tohoto důvodu jsem si připravil celkem 4 vývody ( 2 x + a 2 x – ) jednak pro napájení BECu, tak pro napájení osvětlení.
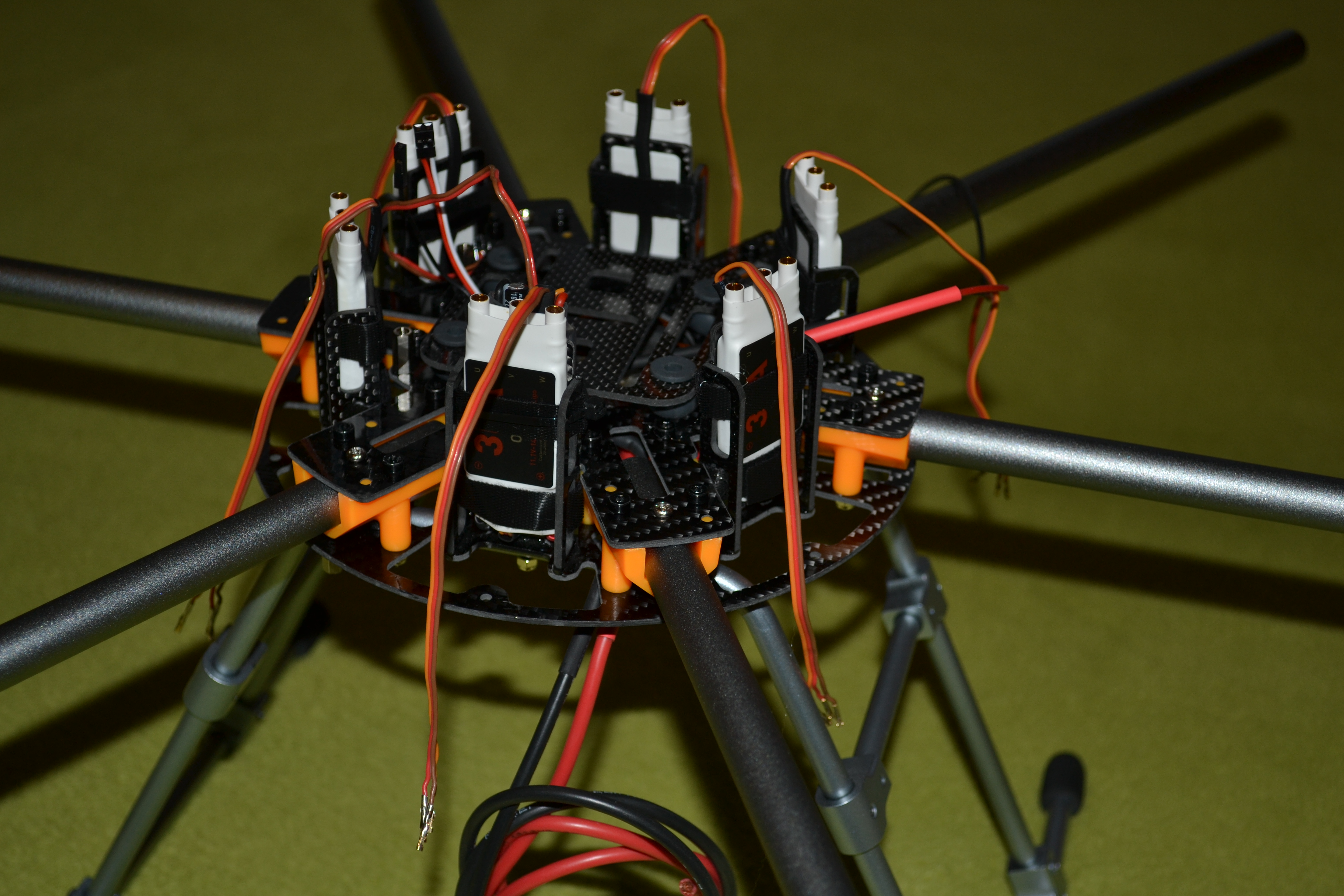
Na dalším snímku je detail na regulátory ( za předním je umístěn BEC ) a taktéž na desku, na které bude umístěna řídící jednotka. Jako řídící jednotku jsem vybral kopii Ardupilota od RCTimeru a to jejich desku pod označením Arduflyer. Je to kopie desky Ardupilot 2.5.
Část pátá – Instalace řídící desky a zapojení regulátorů
Dle doporučení výrobce je řídící deska přilepena oboustranou mechovou lepící páskou a umístěna je pro jistotu ještě na silikonových silentblocích ( soudečky ). Orientace desky musí být dodržena a to šipkou na desce směrem dopředu a připojovacími piny směrem nahoru.
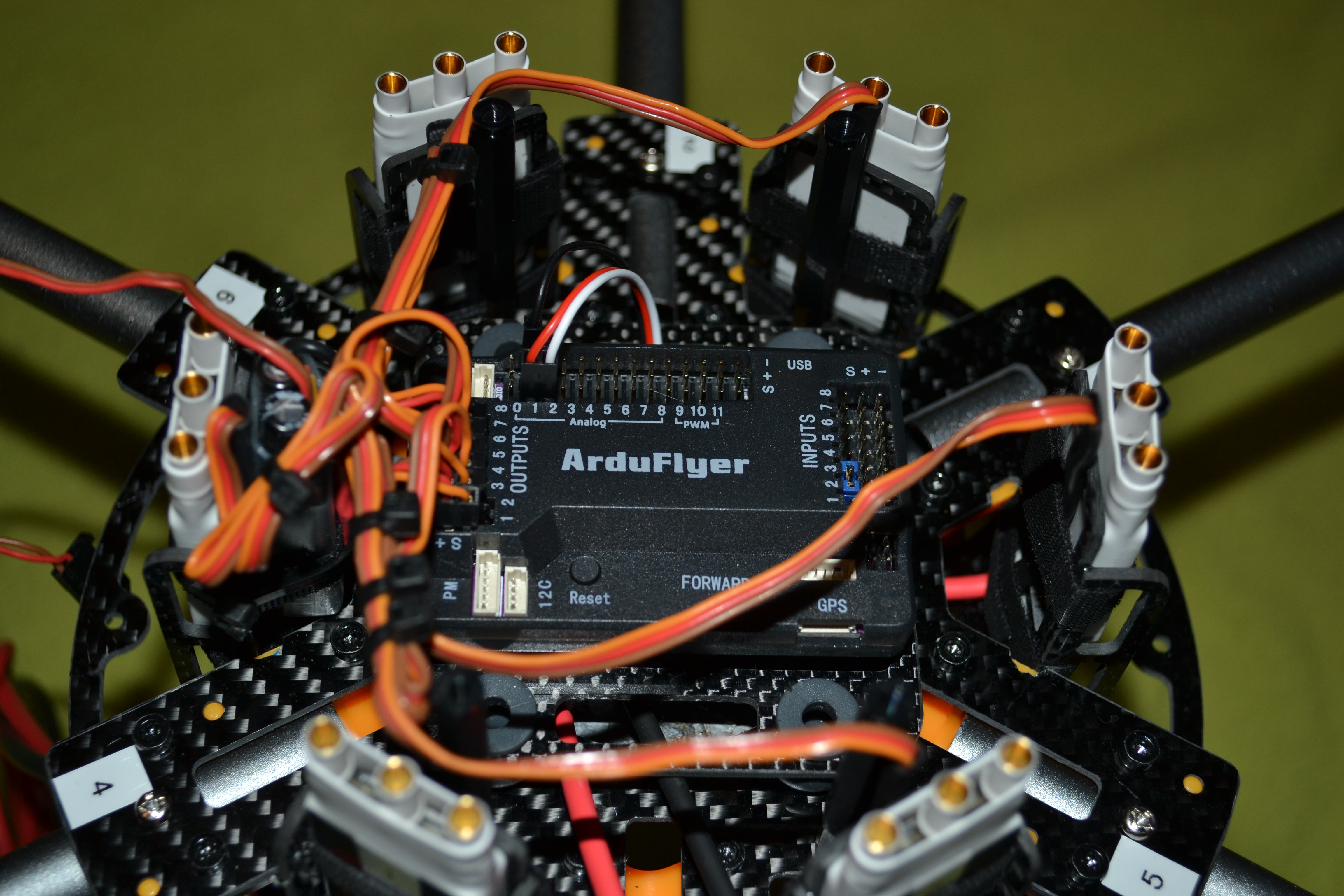
Jelikož je řídící jednotka v krabičce, instalace je jednoduchá a také je z popisu na krabičce hned vidět, kde jdou vstupy a kde jsou výstupy. Na fotografii jsou vstupy vpravo ( od přijímače ) a výstupy jsou vlevo ( k regulátorům ). Mezi těmito konektory jsou ještě nahoře piny pro připojení dalších komponent, jako stavové diody, senzor proudu, pípák, konektory závěsu kamery atd. Ve spodní části jsou vpravo konektory pro připojení GPSky a vlevo pro originální 3DR proudový senzor i s napájením a měřením. Ještě bych se zastavil u vstupů. Tato deska nabízí i zajímavou možnost použít od přijímače na prpojení pouze 1 kabel a to se signálem PPM. Stačí na jednotce spojit signálové piny 2 a 3 a do pinu 1 přivést PPM signál. Jediným omezením je to, že tento signál musí mít pořadí kanálů přesně podle kanálů na desce. V případě toto pořadí nesouhlasilo, ale pomoc je jednoduchá – vysílačka MX-20 HOTT umí v menu „promichat“ kanály dle potřeby a tak nebyl problém dosáhnout správného pořadí kanálů. Toto pořadí je následující : 1 – Roll, 2 – Pitch, 3 – Throttle, 4 – Yaw, 5 – Flight mode switch, 6 – 8 – další přídavné ovládaní, například pro aktivaci RTH, ladění parametrů za letu atd…
Část šestá – Instalace dalšího vybavení a částí rámu copteru
Po vyzkoušení přímo v programu Mission Planner v menu Radio Calibration jsem mohl přistoupit k instalaci dalšího vybavení, které bude umístěno na desce nad řídící jednotkou. Záměrně je tato deska uchycena přímo do horní základní desky a ne do desky s řídící jednotkou. Je to z toho důvodu, aby se do řídící jednotky nepřenášely vibrace z ostatních komponent. Na tuto zvýšenou desku je plánováno umístění přijímače a baterie pro videopřenos.
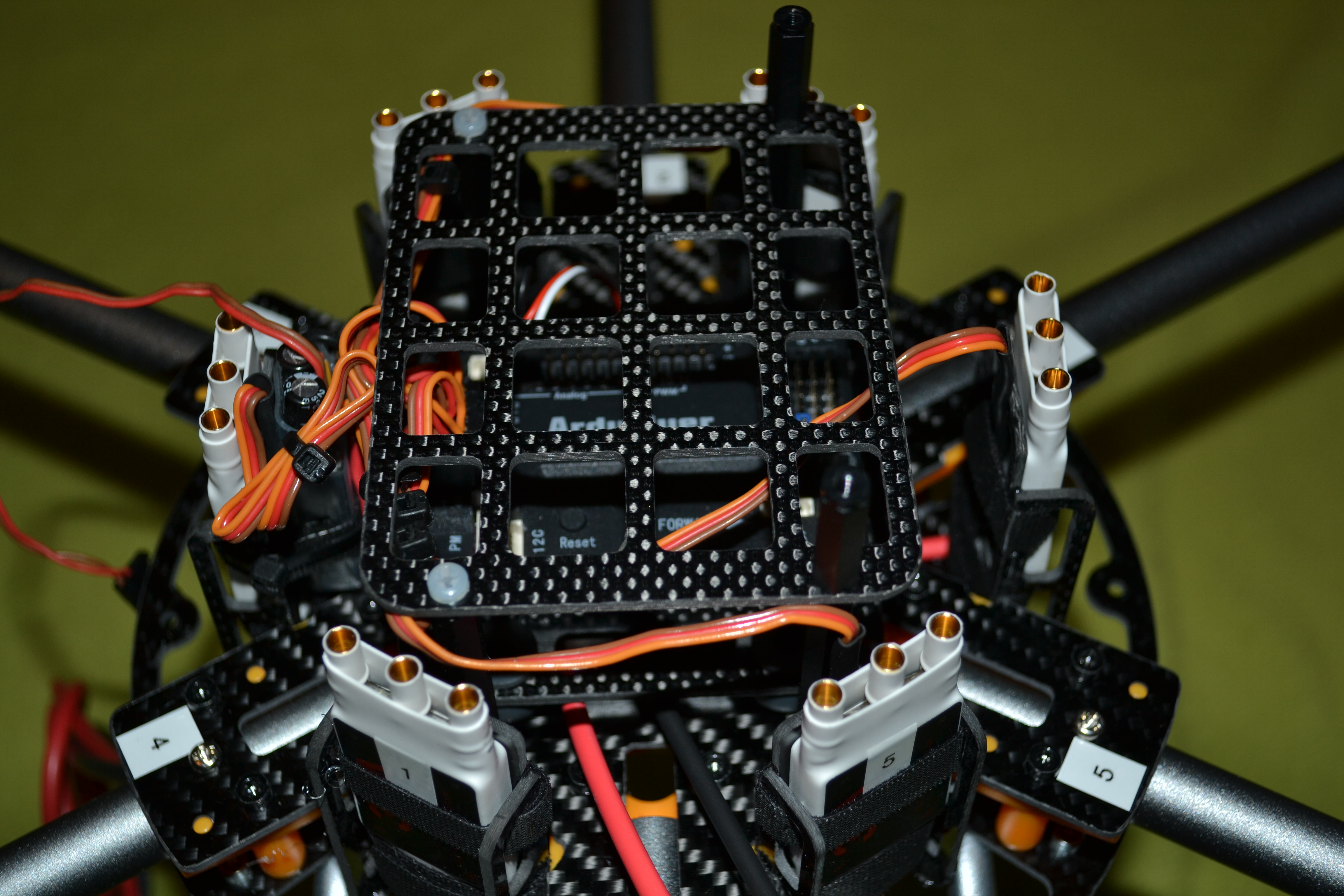
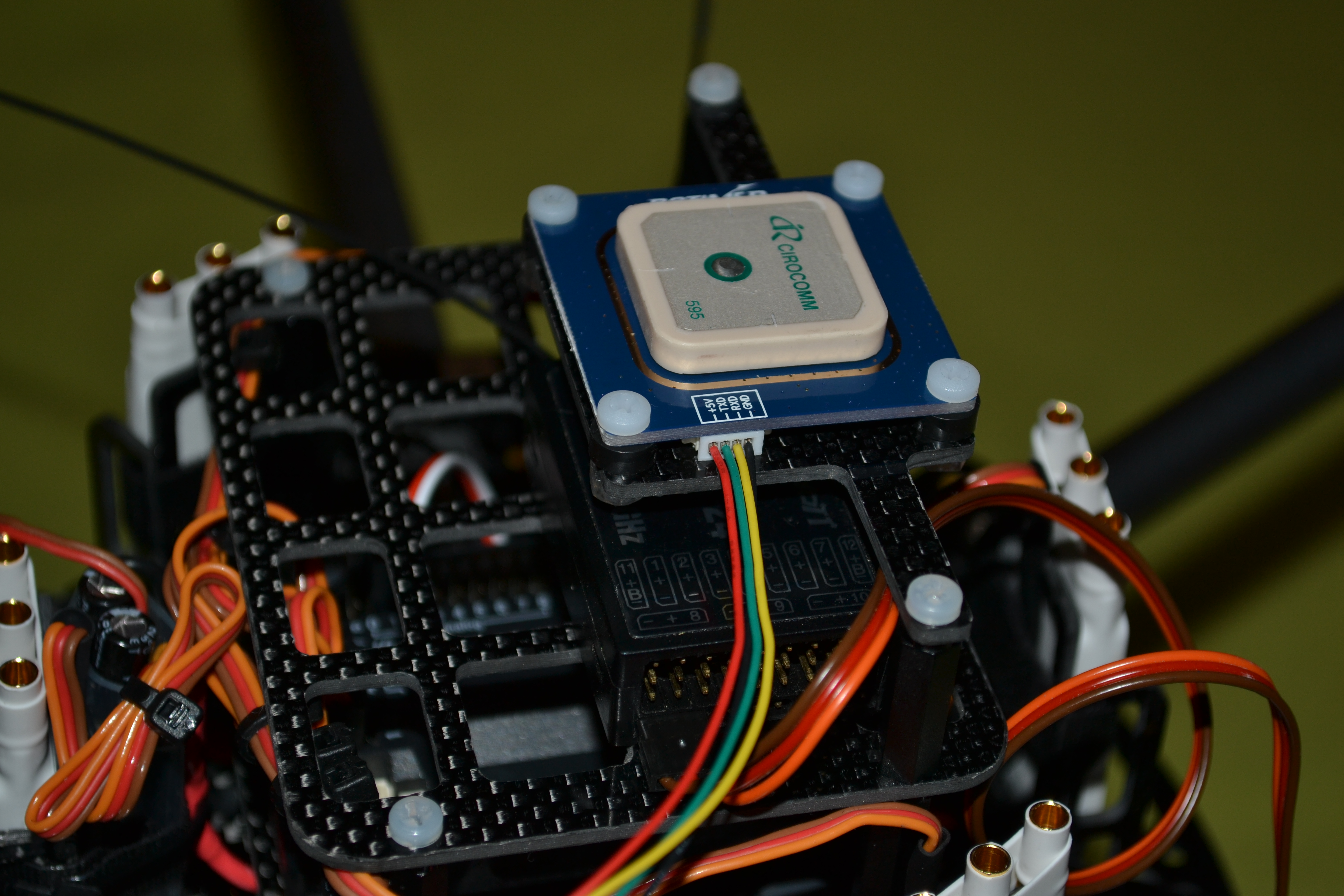
Na plastové distanční sloupky bude nakonec přidělána anténa GPS, aby měla „dobrý rozhled“ na oblohu a nebyla ničím stíněna.
Část sedmá – Instalace osvětlení na ramenech
Před instalací motorů jsem se rozhodl nainstalovat osvětlení. Požil jsem standartní LED diodové pásky, které se dají koupit v každém elektru. Pro svůj případ jsem použil ještě zalité v čirém silikonu ( označení voděodolné ) a to z toho důvodu, aby se při transportu diody nepoškodily. Takto zalité jsou lépe chráněny. Ovládání osvětlení bude řešeno z vysílačky jedním kanálem a bude mít 3 stavy : Vypnuto – Osvětlení zadních ramen – Kompletní osvětlení. Vypínatelné osvětlení z toho důvodu, aby po instalaci kamery nebyla zbytečně „přisvěcována“ diodami. V tuto chvíli si někdo možná řekne, že na FPV copter je osvětlení zbytečné, ale pro mě ne. Přeci jen s copterem hodlám létat i neFPV a tam je docela vhodné vidět orientaci ve vzduchu. LED pásky jsem nalepil jak na spodek ramen, tak na vnitřní strany. Boční nalepení je vidět z přiložených fotek.
LED pásky nejsou lepeny přímo na duralová ramena, ale na ramenech je navlečena transparentní smršťovací bužírka a až na ni jsou nalepeny diodové pásky. Pro jistotu jsou ještě zafixovány stahovacími páskami. Přeci jen se při provozu zahřívají a mohly by se odlepit. A také na zakulaceném povrchu drží mnohem hůře než na rovném. A ta spodní smršťovací bužírka je jako ochrana před nechtěným zkratem, přeci jen člověk nikdy neví, co se stane. Na další fotce je vidět, jak LED pásky svítí.
Pro odlišení polohy copteru jsem na přední ramena použil barvu bílou, na zadní barvu červenou. Barvy jsem si zvolil podle svého a nikde není psáno, že to takto musí být. Někdy jsem také použil na přední ramena zelené diody a na zadní červené. Někdo dokonce používá i modré diody, ale pro mě jsou modré diody ve vzduchu méně viditelné než jiné. Propojení ke spínačům ještě není doděláno, proto jsem zatím nechal vodiče delší a zkrátím je až při definitivním zapojení.
Část osmá – Instalace motorů
Pro pohon svého copteru jsem vybral po dlouhém rozmýšlení motory AXI 2217/20. Sehnal jsem je dokonce ve zvýhodněném balení a tak jsem se mohl pustit do práce. Bohužel proto, že tyto motory jsou v tomto setu, jsou již z výroby dodány s krátkými vodiči a taktéž s unašečem 8mm na vrtuli. Toto mi bohužel nevyhovovalo, proto jsem unašeče sundat a nechal si je odborně přesoustružit na průměr 6mm. Vodiče od motorů jsem nastavil vodiči se silikonovou izolací 1.5 mm2 a všechny spoje jsem překryl smršťovací bužírkou. Jelikož je izolace na vodičích poměrně náchylná k poškození, použil jsem opět smršťovací bužírku a ještě jednou jsem vodiče zakryl, tentokrát ve větší délce a to skoro až od motoru až dovnitř do ramene, kudy vodiče verou. Samozřejmě i na druhé straně, kde vodiče opouštějí rameno, nasadil jsem také bužírku, aby bylo vše důkladně chráněno. Jakmile jsem motory nainstaloval, stačilo již na konce vodičů napájet konektory Gold 3.5mm, vše zapojit a pustit se do testu směru otáčení motorů.
Směr otáčení motorů je nesmírně důležitý, neboť je dáno, kam se který motor má otáčet a také, kde má být vrtule tažná a kde tlačná. Na vyzkoušení směrů otáčení je nespočet metod, ale já používám 3 základní :
- hned při skládání pomocí servotesteru
- aktivace desky a roztočení motorů
- u ArduFlyera použít režim CLI a spustit motorvý test
V mém případu jsem první metodu nemohl použít, protože v době instalace reglů ješě nebyly motory k dispozici. Druhá metoda je již použitelná, ale poměrně nepohodlná, protože deska se automaticky deaktivuje po chvíli nečinnosti a tak se musí stále znovu aktivovat. Já jsem nakonec použil režim CLI ( Command Line Interpreter ) a v něm jsem aktivoval režim testu motorů. V tomto režimu je každý motor spuštěn na cca 1 vteřinu a poté opět vypnut. Takto jsou otestovány všechny motory a pokud se některý točí obráceně, staří jen na reglu prohodit libovolné 2 vodiče a bude se točit správně. Funkci testu motorů ukazuje následující video.
http://www.youtube.com/watch?v=8uQxh3ge8D8&feature=youtu.be
Já jsem si je označil barvami tak, abych prostřední vodič mohl nechat zapojený stále a v případě potřeby prohodil jen krajní vodiče.
Část devátá – Instalace vrtulí a baterie
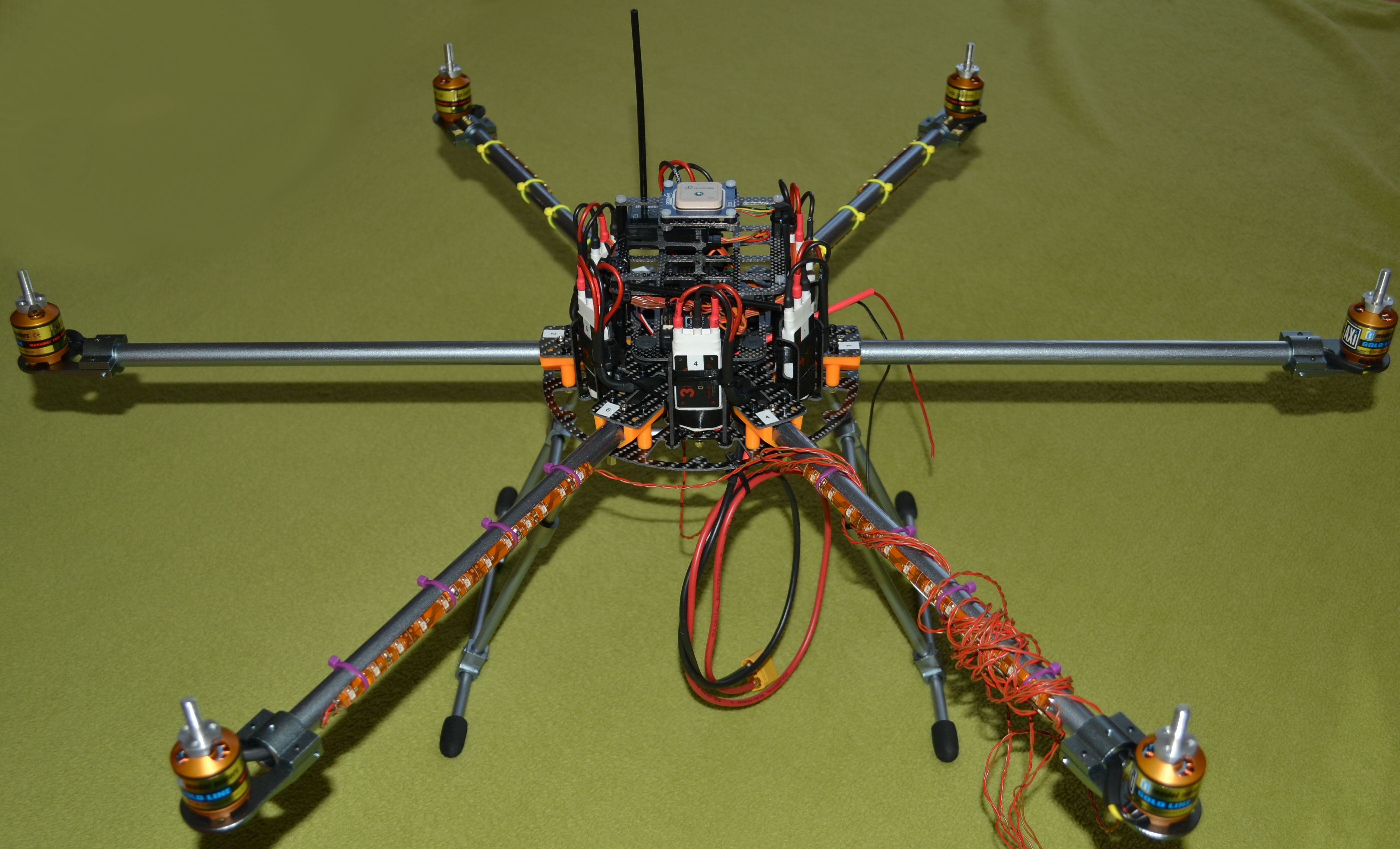
Stavba se již dostává do své poslední fáze a do letuschopnosti zbývá jen nainstalovat vrtule a baterii a může se letět! Vrtule jsem chtěl původně použít APC SF 11 x 4.7 a APC SFP 11 x 4.7, ale naskytla se mi možnost koupit za stejnou cenu vrtule uhlíkové RcTimer 11 x 4.7 a proto jsem je osadil. Dokonce i vnitřní průměr ve vrtulích odpovídal unašečům, takže jsem nemusel nic upravovat. Samozřejmě jsem všechny vrtule vyvážil, takže by neměl být žádný problém s vibracemi a podobnými „nešvary“. Jako další jsem nainstaloval držák baterie. Ten je uchycen pod základní deskou na 6-ti distančních sloupcích a je tvořen uhlíkovými deskami, mezi které se vkládá baterie. Názorně to je vidět na následujících fotografiích.


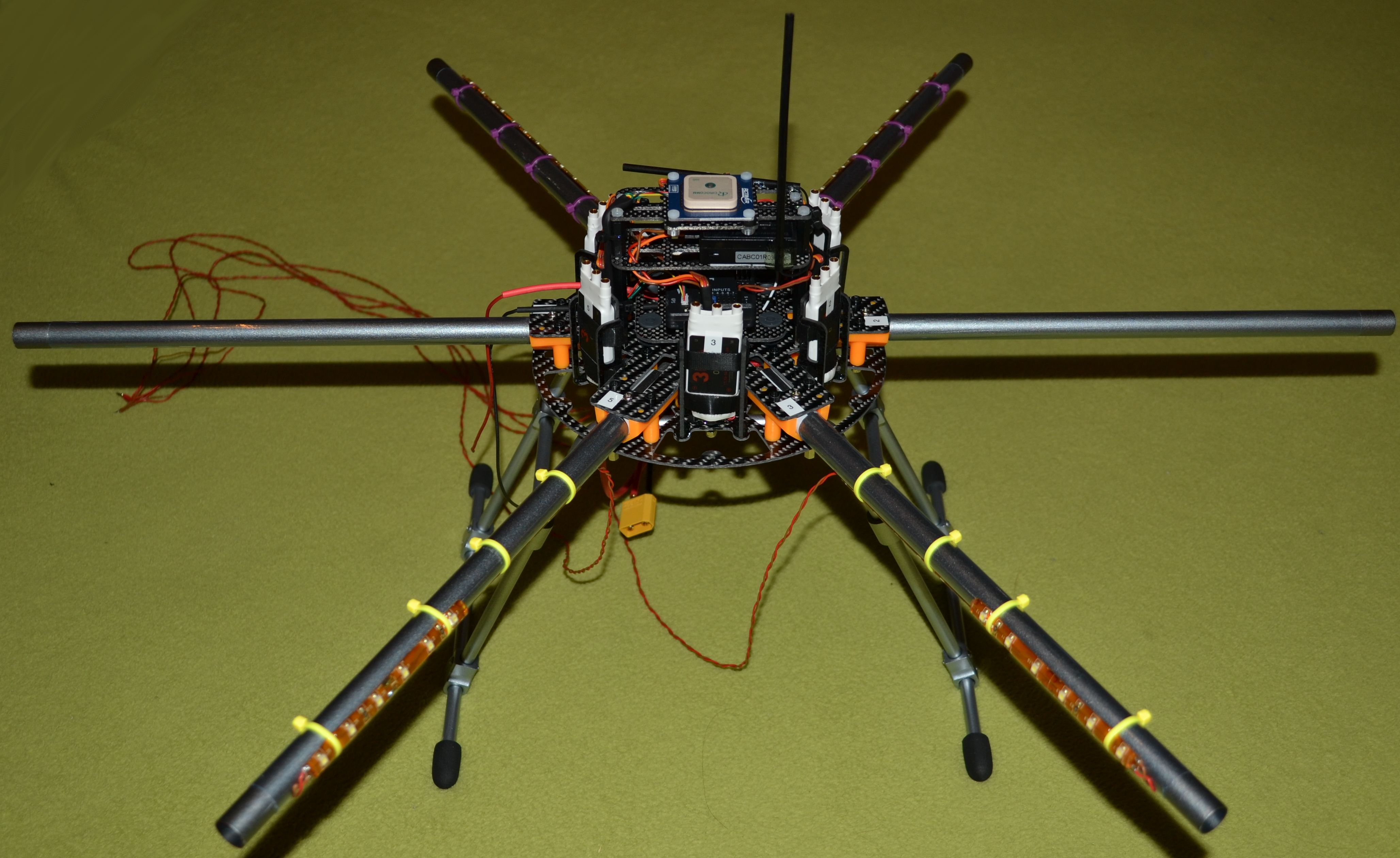
Po nainstalování vrtulí je již copter připraven na první let. Sice ještě neobsahuje kameru ani FPV vybavení, ale na první test je již připraven.

Samozřejmě napájecí kabel ve výsledku nebude vyveden tak jak je nyní, ale zkrátím ho až bude jasné, jak bude usazena baterie a jak vyjde těžiště. Zatím pro testy stejně použiju jednu „horší“ baterii co mám a až bude vše odladěno, osadím baterii, která je plánovaná a to GensAce 4s 5500mAh.
Část desátá – Zálet
Zde snad není komentáře třeba, stačí se podívat na video. Snad jen, že se vše povedlo.
http://www.youtube.com/watch?v=hO2cxNFI0MA&feature=youtu.be
Snad jen statistická data : Z baterie vyčerpáno 1233 mAh, doba letu 2:50 min. Z toho tedy plyne proudový odběr při visu cca 26 A, což v podstatě odpovídá předběžným výpočtům.
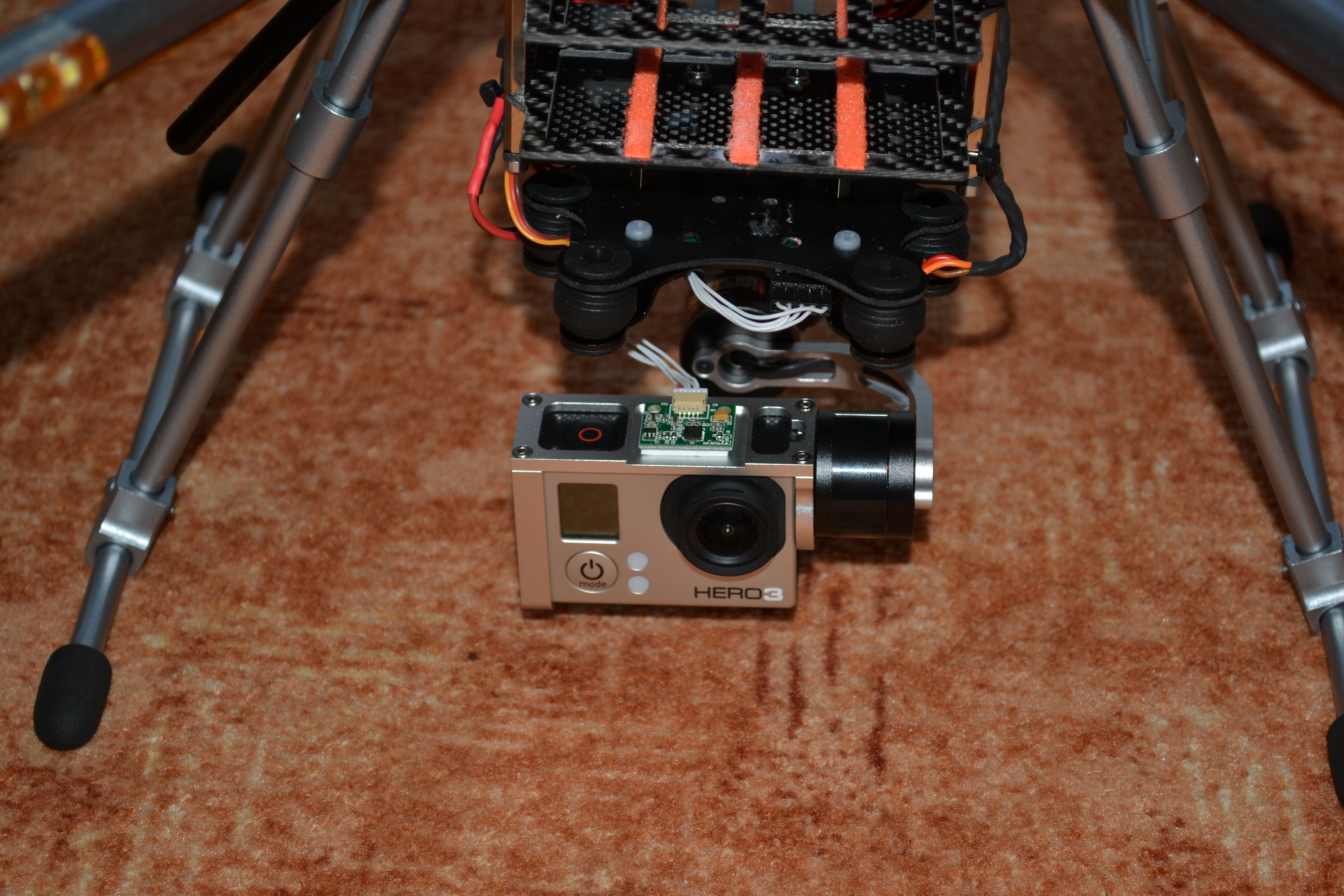
Část jedenáctá – Instalace brushless gimbalu
Po záletu byl čas na instalaci gimbalu na kameru. Jelikož bylo jasné, že budu používat kameru GoPro, hledal jsem gimbal určený hlavně pro tuto kameru. Nakonec se mi naskytla koupě gimbalu Beholder Lite původně určeného pro montáž na DJI Phantoma, ale s trochou malých úprav jsem ho použil i na svého coptera. Usazení je vidět na následujícím obrázku.

Doma jsem provedl předběžné nastavení gimbalu ( překvapivě tovární nastavení bylo nepoužitelné ) a další den jsem se vydal na letiště testovat za letu.
Domácí test je zde, ještě to chtělo poupravit nastavení.
http://www.youtube.com/watch?v=l3-EcNLSuiY
A zde již letový test na letišťi. I zde to chtělo pár úprav, ale i tak je výsledek velmi dobrý.
http://www.youtube.com/watch?v=2Q-DisYv7LI&feature=youtu.be
Část dvanáctá – Vylepšení
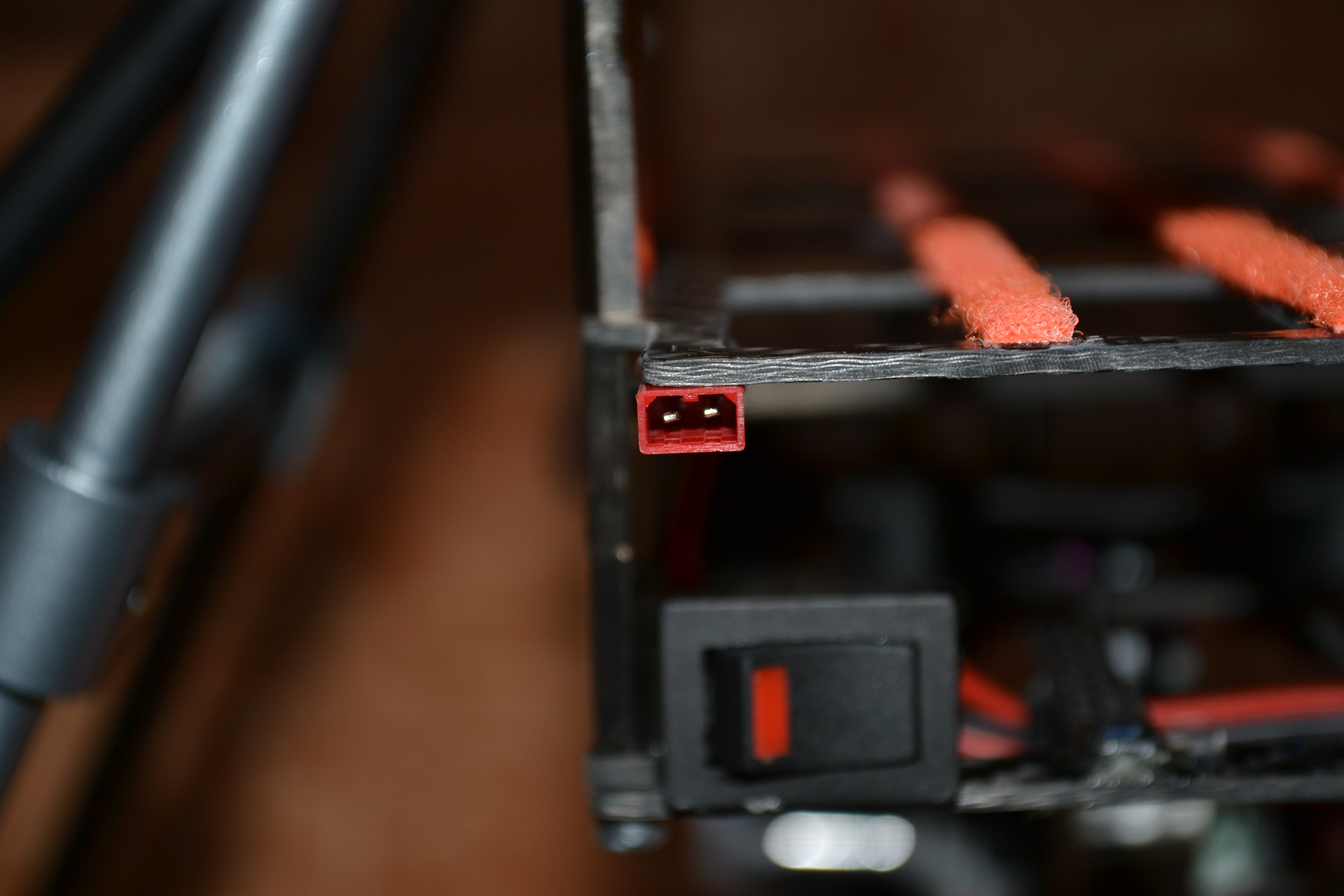
Po několika zkušenostech s copterem jsem samozřejmě přišel na nějaké „vychytávky“, které mi trochu usnadní život. Jako první to je vyvedení USBčka od řídící desky mimo kryt, abych při ladění desky nemusel stále sundávat vrchní kryt. Sehnal jsem krátký kabel ( původně nějaký OTG kabel ) a ten jsem vyvedl nad plato s baterií.
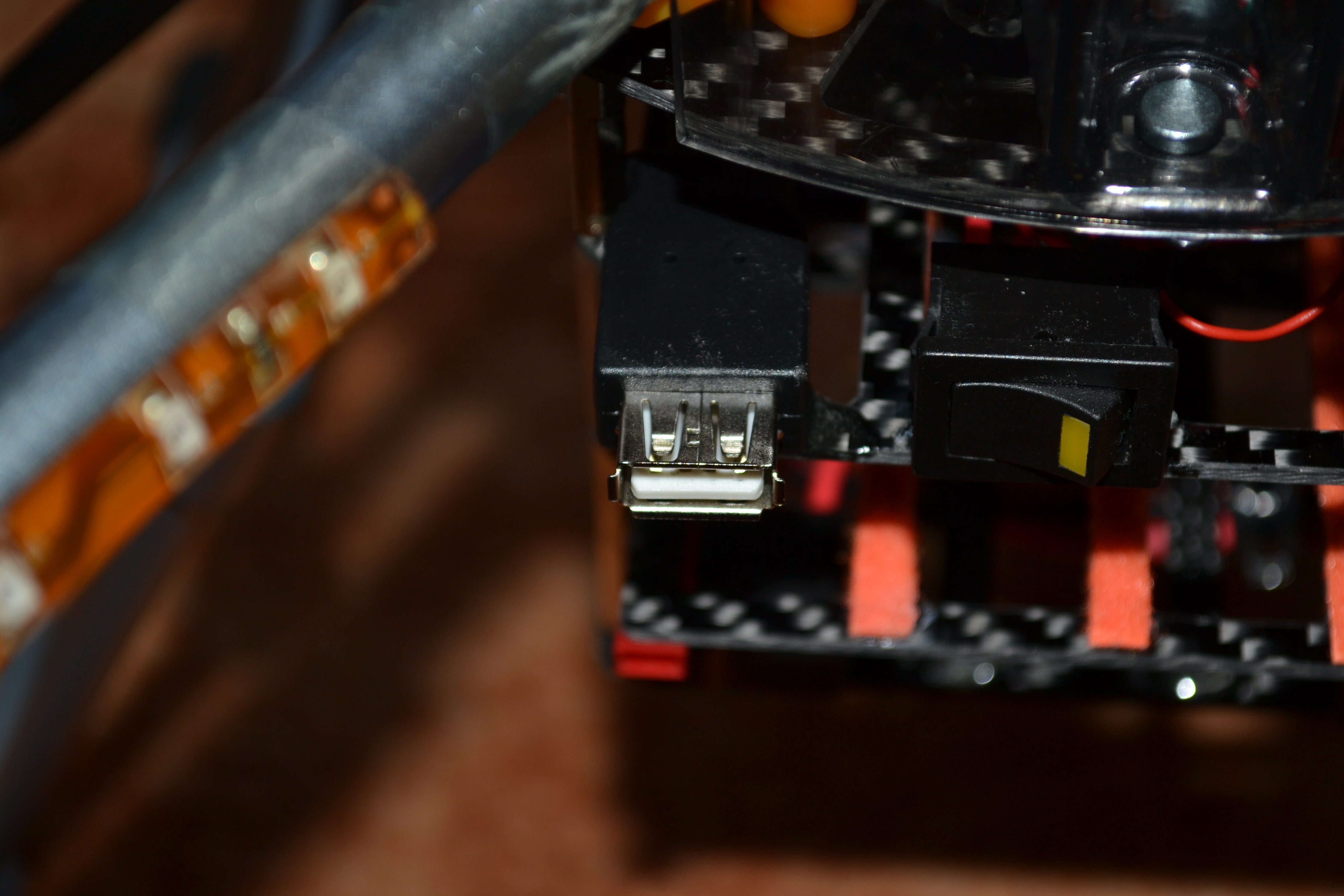
Samozřejmě jako další jsem řešil umístění pomocné baterie 3s na napájení LED osvětlení, gimbalu, videovysílače, OSDčka a podobně. Nakonec jsem také ustoupil od původního záměru instalace pod kryt a baterii jsem umístil pod hlavní baterii a na desku jsem umístil jak konektor od této baterie, tak vypínače, kterými spínám jednotlivé funkce.
Předpokládám, že v průběhu provozu možná přijdu ještě na nějaké drobnosti, ale zatím bych považoval takto postavený copter za to nejlepší, co jsem kdy postavil. Jako poslední úpravu jsem provedl kontrolu všech šroubových spojů po prvních letech, jestli nedošlo k nějakému uvolnění šroubů. Některé šrouby totiž nebyly lepeny ( z důvodu případného rozebírání a předělávek ). Nyní když vše funguje mohu i tyto šrouby dozalepit. Tuto kontrolu doporučuji provádět několikrát za sezonu protože člověk nikdy neví, co se může přihodit za letu.
S těmito slovy bych i ukončil tento obsáhlý článek o stavbě tohoto copteru. Nyní si už jen přát, aby vše dlouho a spolehlivě fungovalo.
Ahoj, zmiňuješ se, že posloupnos signálů v PPM jsi změnil popřehazováním kanálů na MX-20. A to funguje? Mám MC-20 a žádné přehození se v PPM signálu nepromítne. Signál 1 z naza je Airleron ať míchám jak míchám. Nemáš prosím přesnější návod, dík, ZZ
Jak to je na MC-20 nevím, ale i pokud to vysílačka neumí, dá se přímo v desce (například Naze32 + CleanFlight) pořadí určit. Na MX-20 a MZ-24 se tato volba jmenovala Output swap a fungovalo to tak, že jsem jakoby před vysíláním z vysílačky kanály promíchal. Takže ve vysílačce byl stále kanál 1 jako tuším plyn a až v tom „prohození“ se projevil mnapříklad jako kanál 3 podobně jako to je u Futaby. A pokud by toto tvoje vysílačka neuměla, je zde vždy možnost pořídit si „dekodér“, který ti z klasických PWM kanálů udělá PPM signál. A tam si prostě mechanicky „určíš“ co má být který kanál. Pro další info se klidně ozvi, pokud budu vědět, tak poradím.