
Pokud už se modelář rozhodne postavit si multicopter, dříve či později bude řešit nákup komponent. Zde je na místě popsat vůbec základní komponenty copteru a povědět si k nim i nějaká specifika.
Základní komponenty copteru :
- Rám
- Motory
- Regulátory
- Vrtule
- Řídící elektronika
- Baterie
- Přijímač
- FPV vybavení
RÁM
Jedná se o vůbec základní prvek. Bez rámu nelze copter postavit a již zde musíme řešit, jaký rám si vybereme. Základním rozhodnutím bude vůbec to, jaký copter budeme stavět a k jakému účelu ho budeme používat. Samozřejmě pro hexacopter bude rám jiný než pro quadrocoptera. Taktéže se bude lišit copter určený pro sportovní létání od copteru určeného pro letecké fotografování nebo natáčení videí. V dnešní době se dají koupit již hotové polotovary různých rámů pro coptery a je jen na uživateli, jaký si vybere. Co se týče použitých materiálů, dají se sehnat rámy celodřevěné, laminátové, carbonové, duralové a v neposlední řadě kombinované z výše popsaných materiálů.
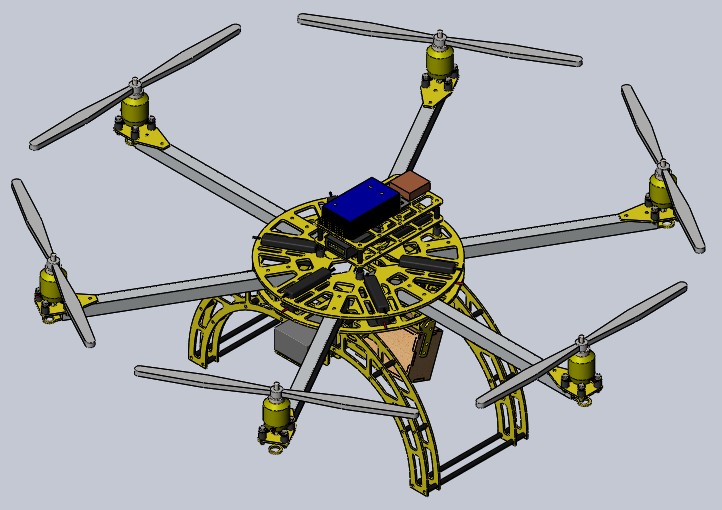
Na obrázku je vidět sestava hexacopteru, kde je rám postaven z kombinace materiálů dural, sklolaminát, překližka.
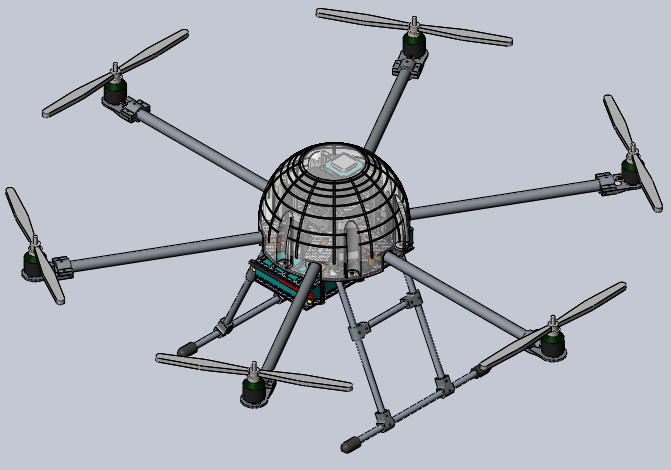
Na dalším obrázku je vidět hexacopter, který bude tvořen duralem, carbonem, plastem a laminátem.
Jako další bych uvedl velmi oblíbený rám pro sportovní létání i letecké snímkování a to DJI F450. Ten je tvořen převážně z tvrzeného plastu a laminátu.

MOTORY
Motory jsou dalším důležitým komponentem copteru a jejich výběru by jsme měli také věnovat náležitou pozornost. U motorů nás bude zajímat hlavně tah motoru, jeho účinnost, možnosti napájení ( baterie 3s, 4s ) a taktéž výrobcem doporučované vrtule pro jednotlivé možnosti napájení. Osobně doporučuji nejprve řešit kvalitu motoru a až poté jeho cenu. Volbou vhodného a kvalitního motoru si zajistíme dlouhodobý bezproblémový provoz copteru. Pokud se ale budeme snažit ušetřit za každou cenu, můžeme ve výsledku splakat nad výsledkem a budeme pouze mrzutí z výsledku. V lepším případě copter poletí, motory se budou přehřívat, budou mít malou účinnost a tím pádem doba letu bude krátká. V nejhorším případě nám může i copter spadnout a zde budou škody mnohem vyšší, než kdyby jsme rovnou koupili kvalitní motory. Osobně mám vyzkoušeno asi 5 typů motorů a s klidným srdcem mohu doporučit motory AXI a motory DJI. Z dalších co jsem zkoušel jsou motory NTM, u nich už je kvalita horší, ale ještě jsou celkem dobře použitelné. Zkoušel jsem i motory RAY a ty jsou do copteru nevhodné. U kolegů jsem viděl i další typy motorů, nějaké Turnigy, Hextronik a další, ale jelikož jsem je sám nezkoušel, nemohu porovnat jejich vhodnost či nevhodnost.
REGULÁTORY
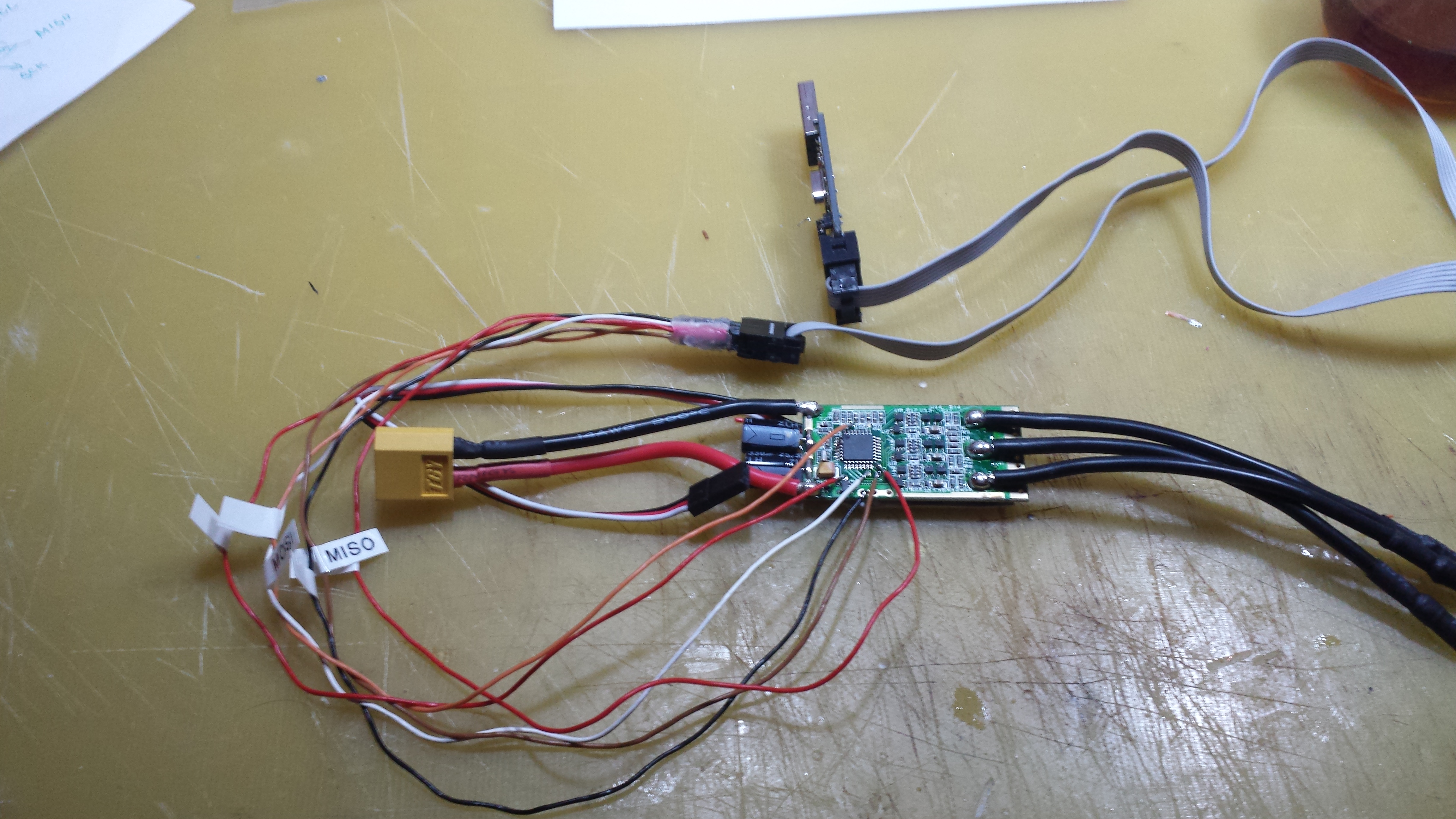
Regulátor je další zásadní komponentou copteru. Je to v podstatě mezičlánek mezi řídící deskou a motorem. A zde narážíme na první požadavek na regulátor a to je rychlost zpracování řídícího signálu a rychlost změny na výstupu – tedy vlastní ovládání motoru. Zde je vhodné uvést, že většina běžných modelářských regulátorů je bez úprav pro použití v copterech nepoužitelných. Nedokáží totiž rychle reagovat na změny na vstupu a tím pádem je odezva pomalá a tím pádem se řídící deska snaží „vyrovnat“ stav, který již ale není aktuální, protože regulátor reaguje se zpožděním. Výsledkem je nestabilní let a také větší náchylnost k pádu díky „zatuhnutí“ regulátoru. Z těchto důvodů je nutné vybírat regulátory, které dokáží zpracovat řídící signály o frekvenci minimálně 400Hz. Většina regulátorů určených pro coptery toto splňuje. Existuje ovšem i další možnost a to i do „obyčejného“ regulátoru nahrát nový software, který si poradí s vysokou vstupní frekvencí a stane se tak použitelným i v copteru. Velmi oblíbený je software SimonK, který se dá volně stáhnout z internetu a „naflešovat“ do regulátoru podporovaného typu. Toto nahrání softwaru ale vyžaduje již nějaké další vybavení a také alespoň základní znalosti o programování a taktéž nějaké počítačové znalosti obecně. Pokud se ale tímto „prokoušeme“, odměnou nám bude použitelný regulátor do copteru. Osobně jsem vyzkoušel regly Turnigy TY-P1 25A a po přehrátí softwaru je používám s úspěchem asi půl roku v quadrocopterovi. Na přiložené fotografii je vidět jak samotný regl, tak programátor a propojovací vodiče.
Ještě jsem se nezmínil o jedné speciální verzi regulátorů a to jsou regulátory od Mikrokopteru. Nezmínil jsem se o nich záměrně, protože pro naše použití jsou nevhodné, jelikož na vstupu nepoužívají klasický signál, ale připojují se přes sběrnici I2C. Právě z tohoto důvodu vyžadují zcela jinou řídící elektroniku a nemají tak univerzální použití jako klasické modelářské regulátory.
VRTULE
Dalším důležitým ( a opomíjeným ) komponentem jsou vrtule. Na úvod jen poznamenám, že se používají vrtule pravotočivé a levotočivé. Je to dáno tím, že se musí kompenzovat tahy od jednotlivých vrtulí a proto je třeba, aby se motory točily proti sobě. Samozřejmě, pokud by byly všechny vrtule stejné, copter by nám neletěl. Co se týče výběru, snažíme se vždy vybírat co nejlehčí a nejpevnější vrtule. Nízká váha je důležitá proto, aby vrtule neměla velkou setrvačnost a tím pádem, aby mohla reagovat rychle na změny řízení. Pevnost je důležitá proto, aby se vrtule nemohla nějak samovolně deformovat, případně být zdrojem nějakých vibrací. Co se týče vibrací, je nezbytně nutné mít každou vrtuli co nejlépe staticky vyváženou. Pokud má někdo vybavení a umí provést i dynamické vyvážení s motorem, je to o to lepší. Dobrou volbou jsou vrtule APC v provedení Slow Flyer, případně uhlíkové vrtule určené pro coptery. Samozřejmě pro obyčejné stroje postačí i obyčejné vrtule, ale pro FPV stroj, případně pro copter na letecké snímkování platí, že čím kvalitnější vrtule, tím lepší.
ŘÍDÍCÍ ELEKTRONIKA
Je v podstatě takovým centrálním „mozkem“ copteru a bez řídící jednotky nelze copter provozovat. Existuje již poměrně dost různých jednotek, od těch úplně nejzákladnějších, které obsluhují „jen“ vlastní let copteru až po komplexní systémy, kde lze konfigurovat různé letové režimy, návrat nad místo startu, držení aktuální pozice atd. Samozřejmě s komplexností jednotky roste i cena, ale ani na řídící jednotce se nevyplatí šetřit.
Samozřejmě pokud stavíme jednoduchý copter pro poletování, může nám posloužit i ta nejobyčejnější KK deska, ale pokud chceme copter použít pro FPV, tato jednoduchá deska nám již nebude dostačovat. A nebude nám dostačovat ani deska bez GPS antény, barometrické čidlo je také velmi vhodné pro např. držení výšky. Samozřejmě pro naše použití budeme nadále uvažovat řídící desky s GPS anténou, případně magnetometrem, barometrickým čidlem, gyra a akcelerometry považuji již za samozřejmé. Bohužel takto komplexní systémy nejsou zadarmo, ale dají se najít levné a funkční varianty. Mezi osvědčené systémy patří NAZA M, WOOKONG, Ardupilot, Mikrokopter, MultiWii, Crius AIO a pár dalších. Ale aby to nebylo tak jednoduché, tak vlastní řídící deska se skládá ze dvou „součástí“. První je vlastní HW řešení a druhé je SW řešení. A bohužel, pokud se „nepovede“ jedna součást, je celá deska určena k zániku. Obě součásti jsou stejně důležité a je velmi důležité, jak vývojáři „sladí“ programový kód s vlastním hardwarem. Nyní bych popsal alespoň ve stručnosti jednotlivé řídící desky :
- NAZA M – poměrně osvědčená varianta a v poslední době s novou generací
( verze 2 ) podporuje i propojení s gimbaly pro jejich přímé řízení. Nastavení parametrů se provádí z aplikace v počítači a vede uživatele krok za krokem. Cenově se tato verze dá koupit i s GPS anténou za cca 10 000 Kč. Není to málo, ale pro jednoduché nastavení a dobré vlastnosti se vyplatí. Dá se sehnat i lacinější verze označená LITE, která je srovnatelná s první generací této řídící desky. Tato stojí cca 5 000 Kč - WOOKONG – profesionální řídící deska určená převážně pro profesionální použití, lze naprogramovat let po určité dráze, připojení gimbalu a podobné speciální funkce. Bohužel cena je okolo 25 000 Kč a proto je určena spíše pro ono profi použití
- Mikrokopter – jak již bylo popsáno dříve, pro individuální použití nevhodné kvůli užitému systému komunikace s regulátory. Ale pokud zakoupíme kompletné copter vybavený a osazený komponentami od MK, dostaneme velmi kvalitní stroj a jeho řídící deska je na velmi vysoké úrovňi a to jak po stránve HW, tak po stránce SW. Cenově jednotlivé komponenty nejsou příliš levné, jako celek vyjde kopter s těmito komponentami na 30 – 50 000 Kč.
- MultiWii, Crius AIO – podobně hardwerově řešené desky, liší se pouze nahraným firmwarem. Bohužel nepatří mezi vysoce kvalitní desky, ale jsou levné a tak se i často používají. Bohužel i já jsem jednu z těchto desek vyzkoušel a musím uznat, že sice fungují, ale mají své mouchy a pro FPV stroj jsou nevhodné
- Ardupilot – moje nejoblíbenější deska a to jednak kvůli ceně ( cca 3000 Kč ), tak ale hlavně kvůli možnostem, které nabízí. V prodeji je již 4. generace této desky ( APM 2.6 ) a s každou generací je vidět pokrok. Nyní asi nejvíce používaná ( a kopírovaná ) deska je verze APM 2.5. Například od RC Timeru se tato deska jmenuje ArduFlyer 2.5, od Hobbykingu je to HK Pilot 2.5. Do všech těchto desek se nahrává firmware vytvořený komunitou okolo projektu Ardupilot. Tato komunita je velmi „plodná“ a vydává vlastní verze firmwaru tak 4x – 6x do roku. A v každé verzi firmwaru jsou zapracovány názory a požadavky uživatelů, takže se jak obslužný software, tak firmware posouvá stále kupředu.
BATERIE
Pro použití v copterech se většinou používají sady 3s, 4s, pro větší a velké coptery i 5s a 6s sady. Co se týče volby baterie pro pohon, záleží na tom, jaké máme motory, doporučené vrtule, regulátory a v neposlední řadě i to, jaký letový čas od copteru požadujeme. Samozřejmě co se týče letového času, čím větší kapacita baterie, tím lépe. Bohužel s rostoucí kapacitou baterie roste i váha baterie a tím pádem nám roste zatížení copteru, stoupá proudová spotřeba a tím se krátí letový čas. Z tohoto důvodu je důležité volit baterii jako rozumný kompromis mezi letovým časem a váhou bateie. Jinak co se týče použitých značek baterií a jejich proudových zatížitelností, je nutné volit vždy s rezervou oproti tomu, co si vypočteme. Naštěstí pro coptery se většinou používají sady s velkou kapacitou ( od 4000mAh výše ) a proto si zde vystačíme i s méně Cčkovými bateriemi, protože již jeden parametr do výpočtu máme poměrně vysoký. Takže například pro baterii 5000mAh se zatížitelností 20C je výsledný proud 100A.
PŘIJÍMAČ
Volba přijímače zívisí na použité vysílačce a jediný větší požadavek na přijímač je počet kanálů. Pro většinu copterů postačí i obyčejný 5-ti kanálový přijímač ( 4 kanály řízení + 1 kanál na letové režimy ). Ve většině případů si ale s tímto nevystačíme, pokud například budeme ovládat kameru, jsou to další 2 kanály, ovládání spouště kamery 1 kanál a pokud budeme takto postupovat, dostaneme se klidně i k přijímači s 12-ti kanály.
FPV VYBAVENÍ
O FPV vybavení je napsáno dost v sekci Teorie FPV