
V tomto článku popíši stavbu mého prvního hexacopteru a popíši, na co si dát při návrhu a stavbě pozor a co nedělat stejně jako já. Berte tento článek tedy spíše jako příběh o mé nesnadné cestě k prvnímu letícímu copteru. Bohužel jsem s ním nakonec mnooho nenalétal, ale nebudu předbíhat událostem a začnu od počátku.
Psal se rok 2011 a někdy ke konci roku jsem se začal zajímat o coptery. Kolega modelář se chtěl také věnovat této „nové“ modelářské kategorii a tak jsme se rozhodli, že si nějakého coptera postavíme. Kolega se rozhodl pro tricopter a já jsem začal uvažovat nad quadem, případně nad hexou. Tricopteru jsem zavrhl rovnou, nelíbila se mi nutnost použití ovládaného zadního rotoru kvůli mechanické náročnosti. Nad quadrocopterou jsem uvažoval dlouho, ale naskytla se mi možnost sehnat levně 6ks motorů a 6ks regulátorů. Motory jsem sehnal z výprodeje AXI 2208/34 Silver line a regulátory jsem sehnal Dualsky 12A. Taktéž jsem chtěl větší nosnost copteru s výhledem na FPV, tak jsem nakonec opravdu zvolil hexacopter.
První vsuvka – záměrně jsem napsal možnost sehnat levně motory a regly. To byla moje první chyba. Opravdu na komponentech se nevyplatí šetřit. Ale jelikož jsem v té době neměl znalosti o copterech jako mám nyní, není se čemu divit, že to nakonec všechno dopadlo neslavně. Hlavně regulátory nebyly určeny do copteru!!!
Dalším krokem byl nákup řídící desky. Opět jsem se vydal cestou levné desky a zvolil jsem čínskou kopii KK desky. Pro někoho, kdo se v deskách nevyzná, je to obyčejná deska se 3-mi piezogyry. Nemá akcelerometry, barometr, GPSku, prostě je to jen obyčejná řídící deska pro řízení copteru. Neříkám, že by tato deska byla nepoužitelná, ale nakonec s touto deskou copter neletěl nikdy. Ale to opět předbíhám.
Druhý vsuvka – řídící deska sice dorazila, ale byl to vadný kus. Deska nefungovala. Když jsem ji zapnul, zdálo se, že vše funguje, ale po zapojení do copteru se na desce krátce zablesklo a deska nefungovala. Sice jsem se snažil desku opravit, ale nakonec jsem zvolil jinou desku.
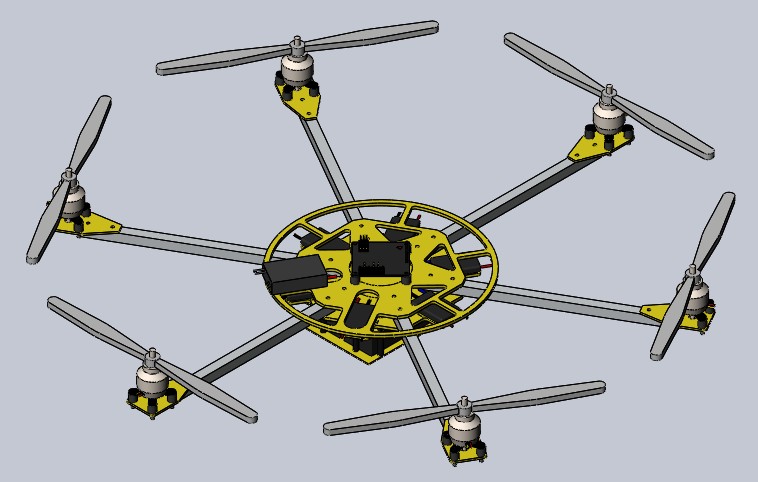
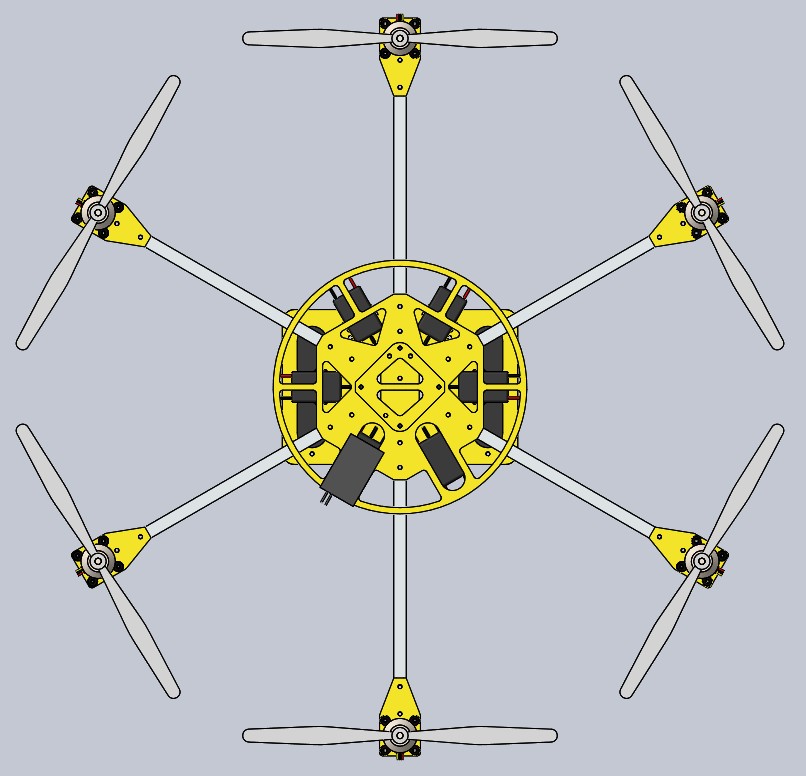
Když už jsem měl pohromadě základní vybavení copteru, přišel čas na výběr rámu copteru. Po dlouhém přemýšlení jsem se rozhodl navrhnout si rám na copter sám a díly si nechat vyfrézovat na řízené modelářské frézce. Jelikož se živím jako konstruktér elektro a mám přístup ke CAD softwaru, návrh nebyl vůbec složitý. Zvolil jsem postavení rámu +, protože řídící deska byla naprogramována v tomto postavení a v tuto dobu jsem nevěděl, jak toto změnit.
Po pár hodinách kreslení vznikl první návrh základu copteru jak je vidět na následujících obrázcích
Po objednání frézovaných dílů jsem čekal na výrobu asi jen týden a po týdnu jsem si přivezl domů celou sadu dílů. Mezitím jsem si vyrobil ramena z hliníkového jeklu o rozměru 10 x 10 mm a tím pádem jsem měl doma vše potřebné a mohl jsem začít stavět.
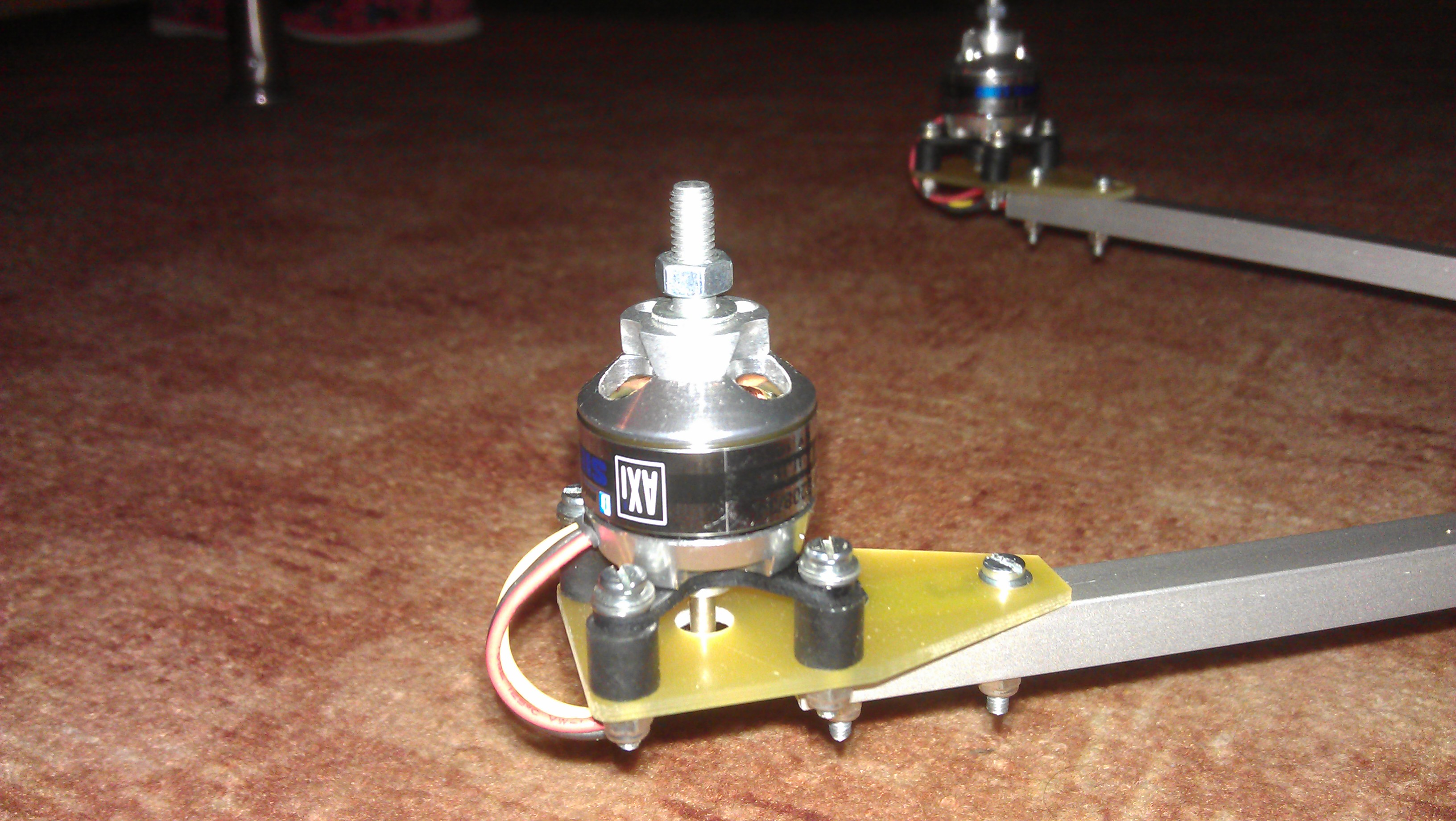
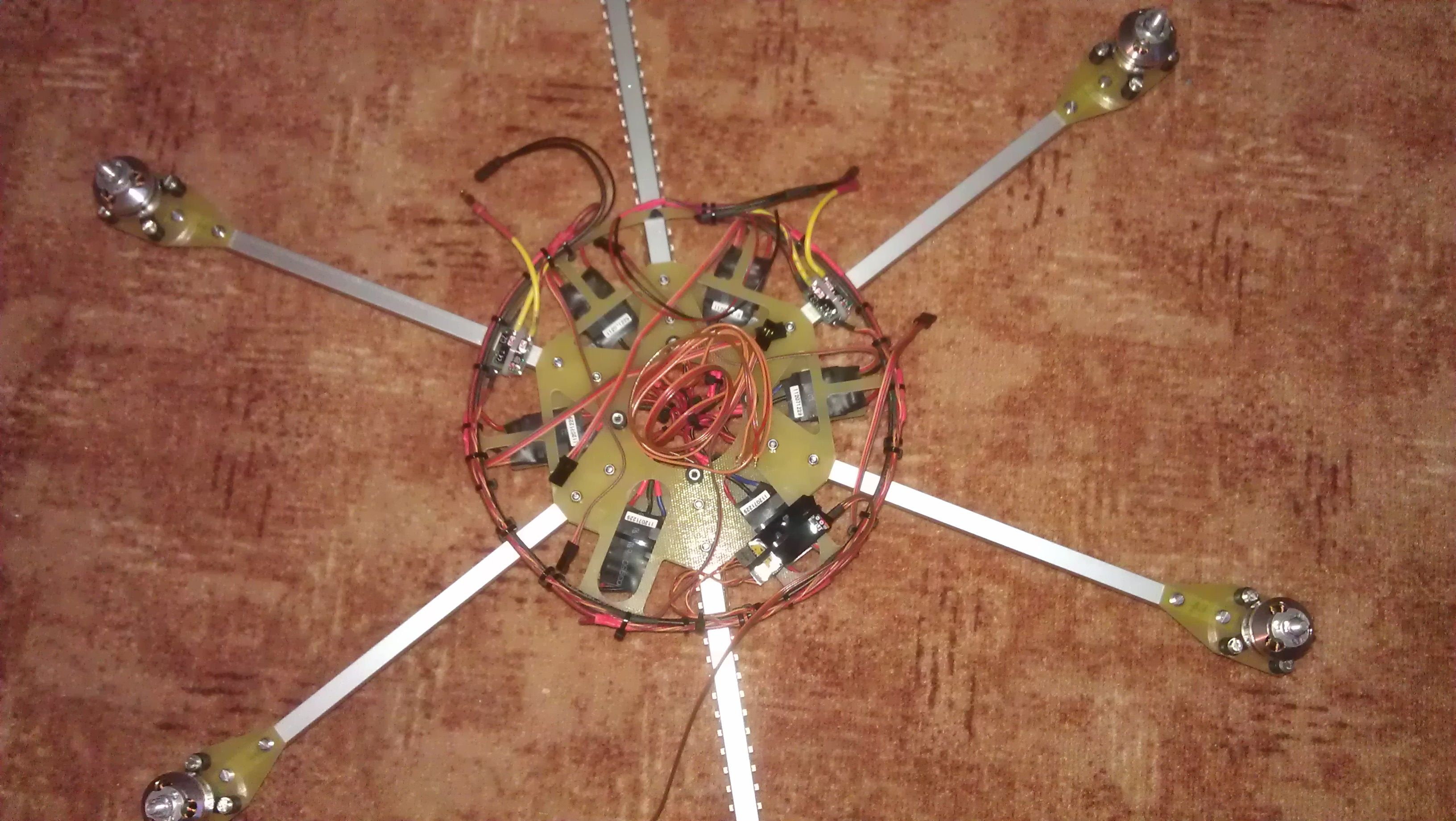
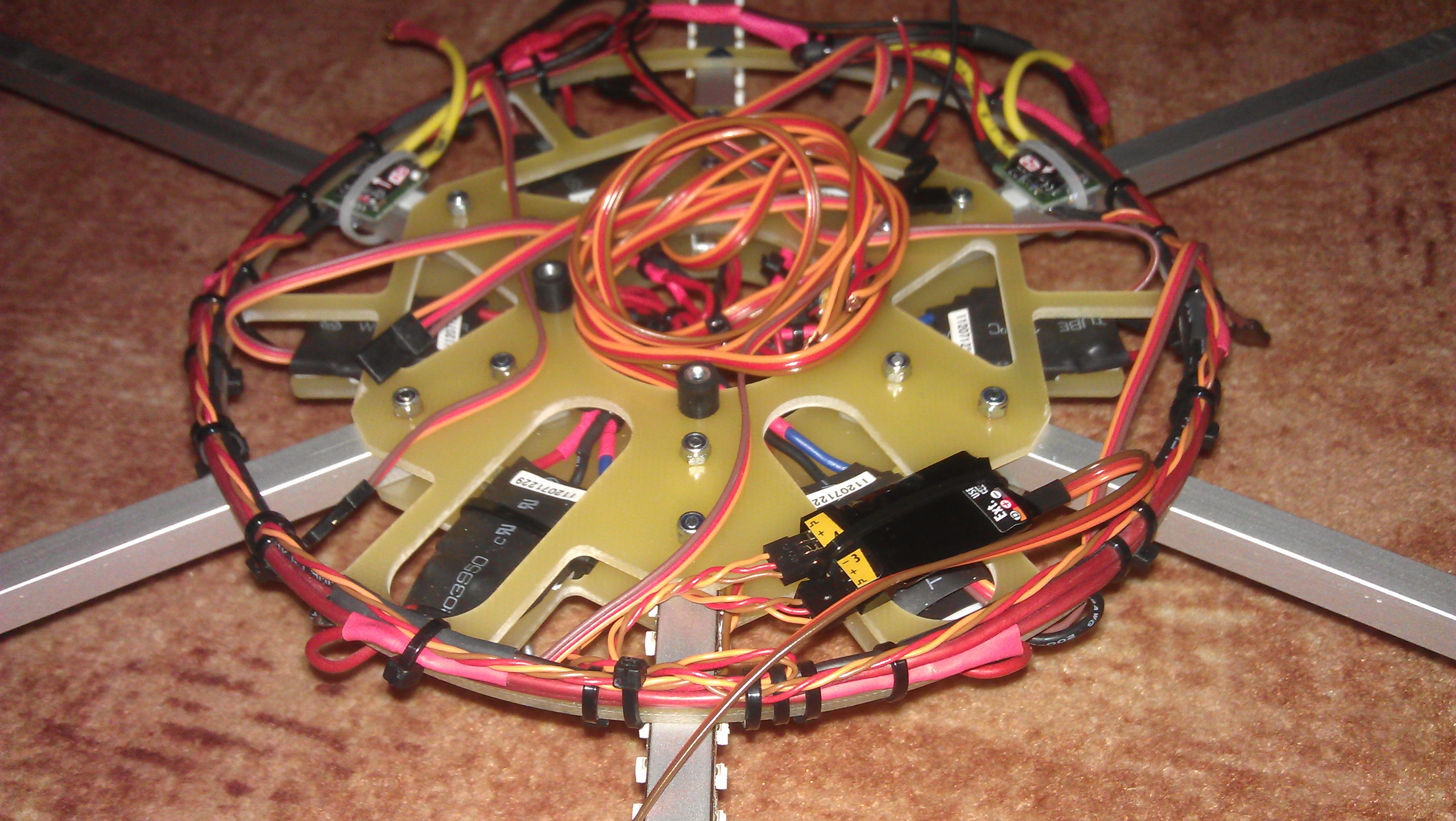
Stavba probíhala poměrně bezproblémově. Od motorů jsem prodloužil kabely vodiči se silikonovou izolací a protáhl jsem je skrz ramena a v těle copteru jsem je připájel k regulátorům jak je vidět na fotkách
Jelikož jsem již v této době byl uchvácen možnostmi telemetrie, osadil jsem na hexu i měření spotřebované energie. Jelikož jsem chtěl použít 2 menší baterie ( opět obyčejné z domácích zásob ), osadil jsem i dvoje měření a regulátory jsem zapojil na 2 samostané okruhy po třech regulátorech.
Třetí vsuvka – použití 2 baterií pro pohon je samozřejmě blbost. Nikde totiž není určeno, jak se budou obě baterie vybíjet a člověk se může dostat ke konci letu do problémů s nestejným vybitím baterií a tím pádem by mohlo dojít i k pádu copteru. Pokud už jsem chtěl použít 2 separátní baterie, měly být propojeny paralelně a osadit pouze jedno měření proudu.
Po asi týdnu práce po odpolednách a ve chvílích volného času jsem byl se základní stavbou hotov
Osadil jsem i LED osvětlení na ramena a přistoupil jsem k instalaci řídící desky a k prvnímu testu.
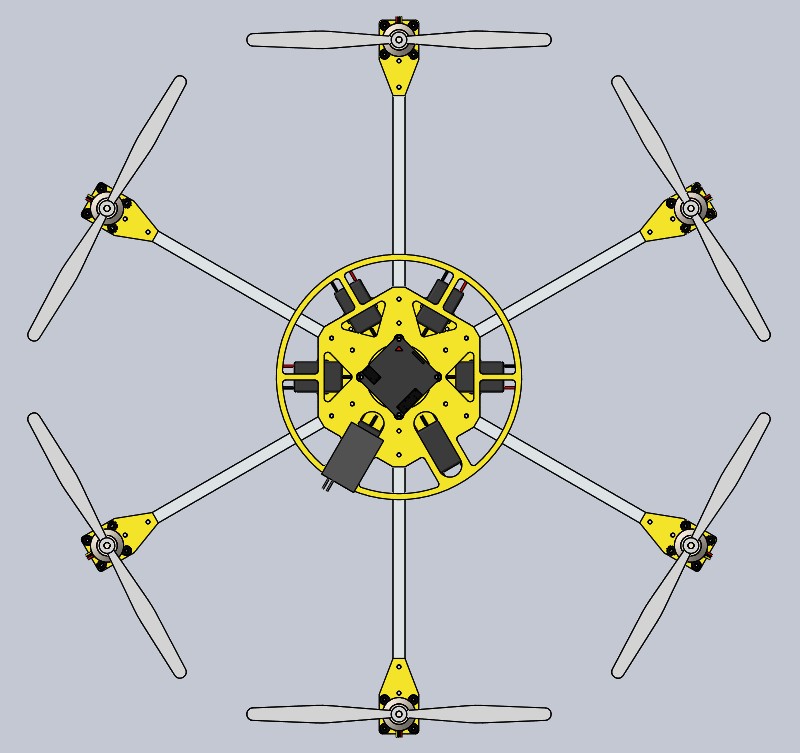
No bohužel po zapojení desky jsem zjistil že nefunguje jak má a po několika marných pokusech o zprovoznění jsem to vzdal a začal jsem se poohlížet po nové desce. Samozřejmě po zkušenostech s touto obyčejnou deskou jsem již tento typ nechtěl a v tu chvíli jsem se dozvěděl o projektu Ardupilot a o jejich řídící desce APM 1. A když jsem zjistil, kde se dá deska tady v republice koupit, bylo rozhodnuto. Jenže problém nastal v tom, že uchycení této desky je naprosto odlišné od původní desky a tak jsem musel doupravit svojí konstrukci a vznikla tak upravená verze hexy
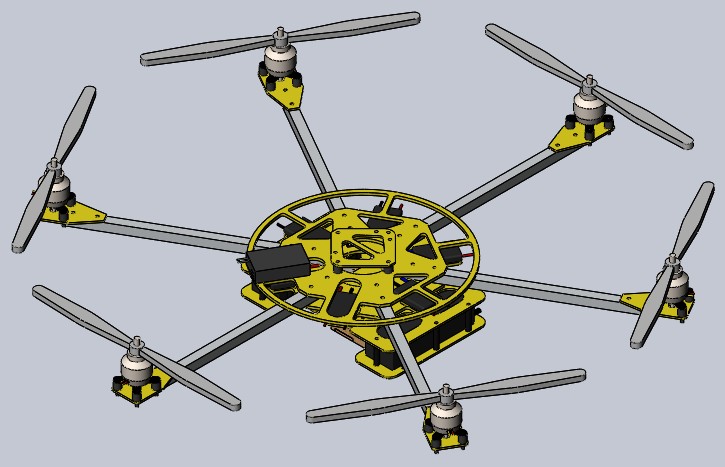
Dokonce jsem i do návrhu již zahrnul i kameru GoPro a nosič baterií
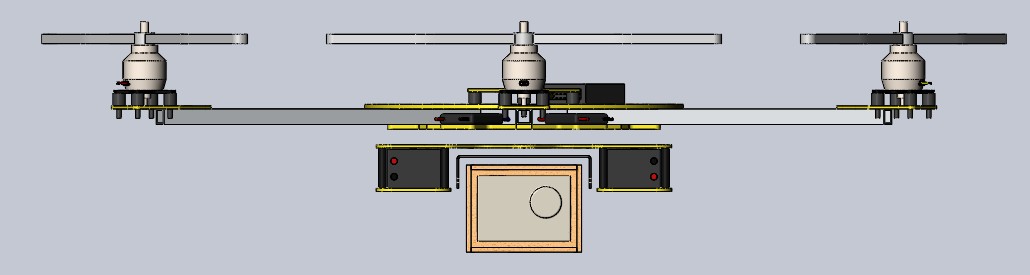
Sice uchycení ještě nebylo úplně dořešeno, ale to mi mnoho nevadilo, to jsem měl v plánu dořešit „za pochodu“.
S novou řídící deskou již vše fungovalo a tak jsem mohl 18.2.2012 provést zálet hexacopteru. Při záletu byl i kolega a kamarád Milan a ten provedl i záznam tohoto počinu.
http://www.youtube.com/watch?v=iy8Jzokx7L0&feature=youtu.be
Jak je vidět a slyšet na záznamu, provedl jsem mnoho chyb jak při výběru komponent, tak i při záletu. Přeci jen cokoli trimovat na copteru je blbost, stejně tak jako si myslet, že vše bude fungovat správně se standartním nastavením řídící desky. Funkce RTL a její test taky při záletu nebyl asi nejlepším nápadem. No jak je vidět na videu, sice copter letěl, nespadnul, ale k dobrému letu to mělo hodně daleko. Samozřejmě letový projev ovlivnil negativně i výběr nevhodných regulátorů a v neposlední řadě i moje nezkušenost s řízením copteru a s jeho ovládáním. Ovšem v době záletu jsem si těchto chyb nebyl vědom a tak naladěn tímto „úspěchem“ jsem se za 2 dny vydal na další letový test a tentokrát již s kamerou na palubě copteru.
Bohužel let nedopadl nejlépe. Ale pro shrnutí uvedu, že regulátor od motoru na předním ramenu za letu vyhořel a jelikož byly regulátory pomalé, již deska nedokázala provést nějakou korekci tohoto výpadku a hexa se zřítila z asi 8m. Jelikož i řídící deska nebyla na copteru nijak krytá, tak dostala „přímý zásah“ a bohužel se poškodila. Jinak škody na copteru byly relativně malé, nějaký popraskaný laminát, ohnutá ramena a ulámané vrtule.
Závěrečné shrnutí mých chyb :
- výběr nevhodných pomalých regulátorů z neznalosti potřeby rychlých reglů
- nevhodné rozdělení baterií a regulátorů mezi 2 baterie
- chyby při záletu, kde jsem chybně pokládal trimování za vhodné a tím pádem jsem zamaskoval již viditelné problémy s předním regulátorem
- hned při druhém letu instalace kamery a vydání-se na delší let
- celkově velká nezkušenost s coptery
Takže závěrem bych jen uvedl, že jsem se z těchto všech chyb snažil poučit a všechny další coptery, co jsem postavil už byly kvalitnější a hlavně v nich byly použity kvalitnější a rychlejší komponenty.